We received our first GoBox last week - loved building the robot and it worked great in drive mode. My son went into Blockly to try and code a path through the obstacle course he built and found that in that mode one motor/wheel is not spinning so the robot just goes in a circle.
If he goes back to drive mode it works fine.
Not sure what about the coded modes would cause that?
Hi @h.elizabeth.hall, Please drop an email to support@modrobotics.com about this, and then come back to the forum and let us know what you find out from Support.
We are using the GoPiGo OS with a Raspberry Pi 3 model B+.
Tried a few things today after talking to customer service - we tried to calibrate the motors which improved the drive forward command but any additional turn command causes the robot to begin spinning endlessly again. Have sent that back and waiting to hear next suggestion.
Customer service suggested the encoder pins and wheel as well - a slight adjustment of the pins seems to have things up and running!
Thank you for the help!
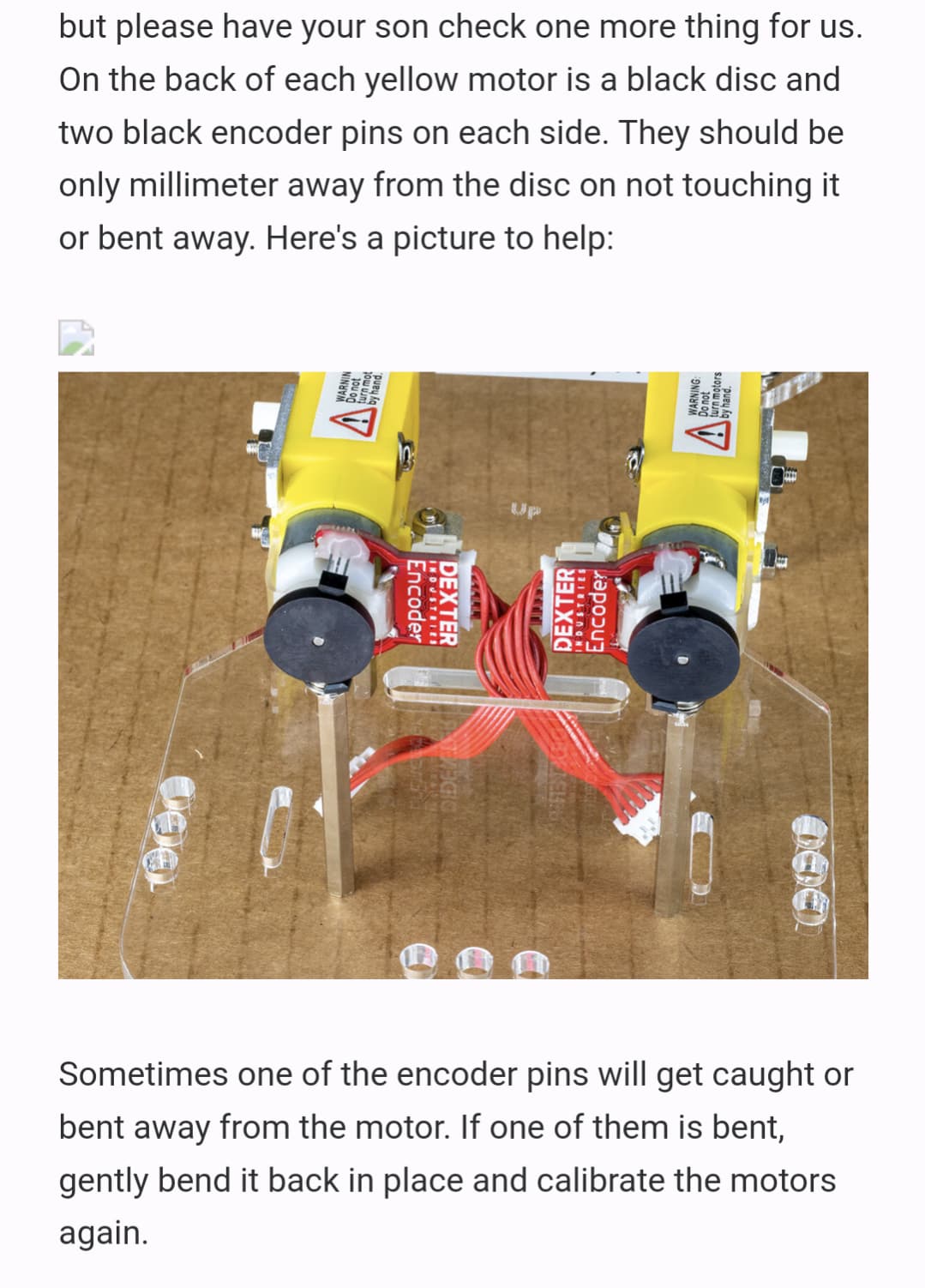
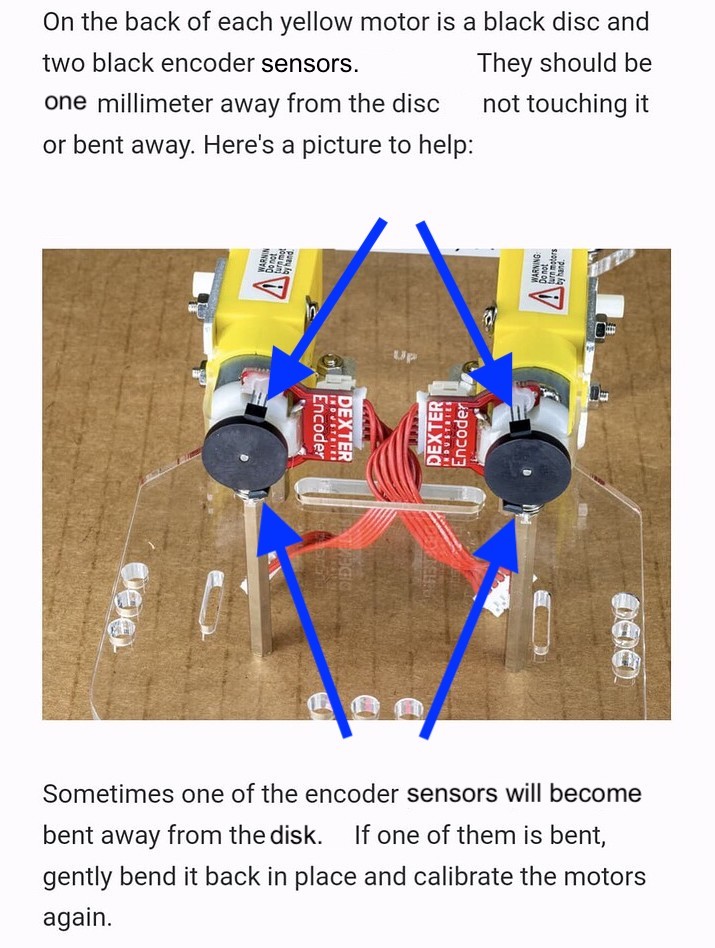
This is the picture from the help email - the small pins on either side of the wheel. In the motor that was having problems they were bent more than 1mm out from the wheel. Gently pinching them into place and then recalibrating seems to have things running smoothly now.
That had me for a sec also - apparently referring to the “Hall effect sensors” as “encoder pins” since it is unlikely new users would know what a “Hall sensor” looks like.