Yeah - for me that just happens to be what I learned to keep ROS from crashing on a remote robot. Not necessarily the best option - just the one I know. It did take a fair bit of googling to figure out how to configure it, but now that I have that I do enjoy having three terminals on one screen (downsides are you see less in any given terminal, and scrolling in screen requires remembering the right key sequence).
The price has really come down - still not cheap, but you can get a very good 3D printer for about US$400 (see this review of the Prusa Mini+ [I’ve always had good luck with Wirecutter reviews - it’s my first go-to when I’m looking for a new product]).
The design learning curve is real. I’ve been using Fusion 360 - they have a free license for hobbyists (although don’t know if that’s available in Russia). I like the parametric design features. Blender does seem to be a popular program. There is also FreeCAD, which some people seem to like.
And I think the machines are less fiddly than they used to be (or the slicers and firmware is better) - it’s more plug and play than before.
For quite some time I have been baffled by the “low” maximum speed Dave would go under ROS control.
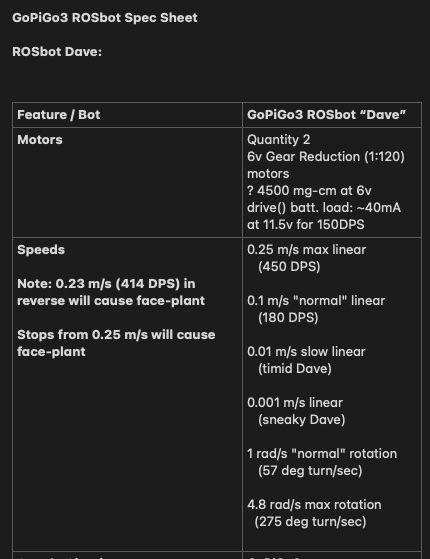
When I first built Dave, I did hardware testing and characterizations to make sure he was working and to understand any differences of the “new GoPiGo3” from Carl’s generation. I recorded in my “Dave Specifications” a max speed of 0.25m/s for command of 450 DPS.
But the fastest I was getting out of my ROS2 GoPiGo3 node was 0.1m/s.
First discovery was that my wheel logger was resetting the GoPiGo3 red board “speed limit”.
After fixing that, I still was only seeing 0.17 m/s which is about 300 DPS. That number triggered a connection. The GoPiGo3 class instantiates with a DEFAULT_SPEED of 300 DPS. There is a NO_LIMIT_SPEED constant of 1000, but the true no limit speed is actually set by gpg.set_motor_limits(MOTOR_LEFT+MOTOR_RIGHT, 0) - zero means no speed limit!
I added this line to Dave’s ROS “on_twist” callback and sure enough, he could zip like he did with my “no ROS” wheelDiaDriveTest program.
BUT he doesn’t drive straight when the “turbo charger” is invoked. I had to program turbo bias and bias threshold parameters into the ROS node, and tune the SNES gamepad parameters again.
I also had to train myself to slow before stopping to prevent faceplants, and train my fingers on the faceplant recovery maneuver (turbo reverse, immediate turbo forward, immediate release).
Now Dave should be able to do his “ROS GoPiGo3 1k Time-Trial” at 0.25m/s for an expected 1k pace around 1:07.
Oh, it’s a thing for me as well - looking forward to following the progress. Not quite the Indy Autonomous Challenge, but close. Might not make the ERPN* main channel, but would definitely make ERPN2
/K
ERPN = Electronics and Robotics Programming network. Which is a delusion I have I personally would find it way more interesting than ESPN. Although maybe that’s what YouTube is for
Went to the Wirecutter article, (Wow! Really well written), and then to the Prusa site. Impressive! (@cleoqc, @mitch.kremm, are you looking for a 3D printer?)
It reminds me of my own GoPiGo review article.
I was howling at one of the reviews though, where this Army guy is talking about all the El-Crappo printers he has in his collection, (for target practice, I presume), and then he gets to the Prusa printer:
It’s like the googly eyes on the GoPiGo. Silly? Yes. But it’s fun; and even ancient and cobwebby hobbiests need a laugh now and then.
Then he talks about the printer.
You’d think he got religion! Well, after five or so prior printer purchases that turned out, (ahem!), “sub-par”, his enthusiasm is understandable.
On the other side, there appear to be a few issues of build quality as several users reported units with varying problems on arrival. One reported the cross-member seriously out of alignment, which is scary.
All were resolved, but the thought of ordering a printer, going through the hassle of getting it shipped to Russia, and then finding out that it doesn’t work scares the bejesus outta me.
All in all it sounds good, with the few grains of salt thrown in.
My biggest concern is the un-supported cross-member. I can easily imagine it slooooowly drooping over time.
Beats the out of The Weather Channel’s inane coverage and endless reality TV reruns.
And yes, I am watching this with both anticipation and shame while Charlie collects dust.
@cyclicalobsessive, what happened to your YouTube channel(s)? One day I had an active subscription, the next day - nothing. I looked forward to your videos about Carl and I wonder what happened.
with confirmation that raspistill works on Ubuntu 20.04. So the lack of 64-bit support for the Python picamera module will not prevent Dave from taking a few snapshots along his run.
Raspistill has a time lapse capability that can snap 640x480 jpeg images at 1 fps without needing to skip frames. (Will have to confirm it can keep up when the processor is also loaded by ROS nodes.)
I stole the tilt mount from Carl’s discarded Husky-Lens. Now Dave’s camera angle can be adjusted so the bottom of the frame shows the ground 12 inches ahead, and the top of the frame shows the top of my head when I stand 10 feet away.
Running raspistill at 1 fps for a max of 2 hours will generate 7200 frames, which at 640x480 should take about 2.5GB of file space. (19GB free currently)
Running the time lapse image capture also adds about 40mA load on the battery, which will steal about 20 to 30 minutes off an endurance run, but should not be a factor for this 1k run.
Hopefully I will be able to use the images for testing Dave’s future “ROS2 Autonomous Driving on the Sidewalk” node that he will need to up his 1k running game.
On Mondays and Fridays, I transport myself for a 5k run/walk over the self-same sidewalks Dave has been planning to travel for his “Great GoPiGo Gallup”. My mother used to scold me for looking down so much while walking, and I guess I haven’t licked the habit. As I was running and looking down I realized -
That bottle cap is about 28mm across. Dave’s little castor ball is only about 18mm across, and GoPiGo3 robots don’t jump - not tall buildings, not over the moon, and certainly not over these sidewalk expansion joints.
This might not be totally out of the possible, if Dave could learn a “balance bot caster jump”. After crossing the sidewalk crack with his main wheels, he could initiate an intentional face plant motion into a balance bot mode, and make his caster “jump” over the cracks.
Unfortunately for Dave, his coach doesn’t have the patience to teach him that maneuver.

 out of The Weather Channel’s inane coverage and endless reality TV reruns.
out of The Weather Channel’s inane coverage and endless reality TV reruns.