A serious question for both @KeithW and yourself. . . .
Given that the following is true:
(Assume truth if it hasn’t been accomplished yet.)
Dave is:
running ROS version “x”
configured and running.
programmed to do certain things and/or has been “trained” to do certain things.
(i.e. TensorFlow lite, finding his dock and docking a-la Carl, etc.)
Question:
How much of this effort is portable to a different platform?
(i.e. Jetson Nano on a GoPiGo, a completely different robot, etc.)
In other words, how much of your effort is portable and how much goes up in smoke if you decide to turn Dave into a TurtleBot or one of Tom Coyle’s MegaBots with 16" twin turrets in the main battery, torpedoes, and a depth charge launcher?
The short answer - everything but the TF-Lite custom-trained net if the target is a GoPiGo3, and the launch file would need to be tweaked to swap out the rosbot_killa_node for the gopigo3_node.
TF-Lite nets are only as general as the data they are trained on and the information density of the data annotation.
Example a stack with a stupid lane sensor that looks like:
TF-Lite Lane Sensor that publishes:
center of lane as +/- percent of half- lane width
(trained on one width light colored sidewalk with unreliable darker areas on left and right)
“Self Driving Node”:
subscribes to:
Lane Sensor
Forward looking short range Ultrasonic Ranger
Joy_node “Dead-man” Enable Motion Button
publishes:
cmd_vel linear x, angular z
Implements:
if enable button and no fwd obstacle and lane center reading:
implement PID angular z based on distance from lane center
if enable button and fwd obstacle:
stop and start yelling “get outa my way”
if no enable:
twiddle the battery away waiting for the harness to come off
Ultrasonic Ranger node
IMU node
GoPiGo3 Node:
subscribes to cmd_vel
implements linear x and angular z
It may have difficulties if the lighting is different, the sidewalk is wider, the sidewalk is darker than the border areas.
Wife suggested Carl wanted to be at the finish line with a banana for him, but Dave said medals are for boomers. Dave mentioned getting followers and upgrading to 360 video or something. I told Dave I wasn’t following, and he muttered “boomer” back.
What Dave really wanted was a dry martini, “shaken, not stirred”. His race number IS “007”, isn’t it?
Maybe if Carl offered a banana daiquiri, Dave might be more appreciative. . . .
Of course, maybe a glass of fresh-squeezed Florida Orange Juice would be more appropriate?
P.S.
You are bringing extra batteries, right?
P.P.S.
I watched the video and found a bunch of others, some of which are, apparently, “un-rated” and cannot be viewed unless you have a Vimeo account.
Just what I need. ANOTHER account to trigger yet MORE spam-mail when they sell my info to some slime-house spammers.
Only for the remote. The spec on the remote suggests 3-4 hours on a charge, but I am taking a spare USB power bank for that.
If the ModRobotics 11.1 3000mAh pack refuses to play nice outside the house, Dave will just have to ask for a transfer of his “1k run registration” to a different date.
My phone is charged, my watch is charged, Dave is charged, the remote is charged, the remote backup is charged, and the videographer’s phone (wife) is charged. The car tires are at pressure and the tank is full. The water bottles are filled and cold, the refreshments for Dave’s driver and the videographer are set. Dave’s SDcard was backed up. The scripts to start the run and to end the run were checked.
I think we’re ready.
I’ve packed some tape for emergency repairs
Its all in the hands of the creative content and video post departments, with the development team assessing what can be learned, and the communications team working on statements for the investors.
No robots were harmed. The coach and press were seen celebrating till the establishment closed for the night.
Paparazzi caught what appeared to be a robot bouncing happily along:
The video file only contains 10 minutes of frames - mystery. Probably should have stuck with the 1 fps time lapse capture. Dave did not have a way to tell me the video capture had stopped, and thus no “finish line video”
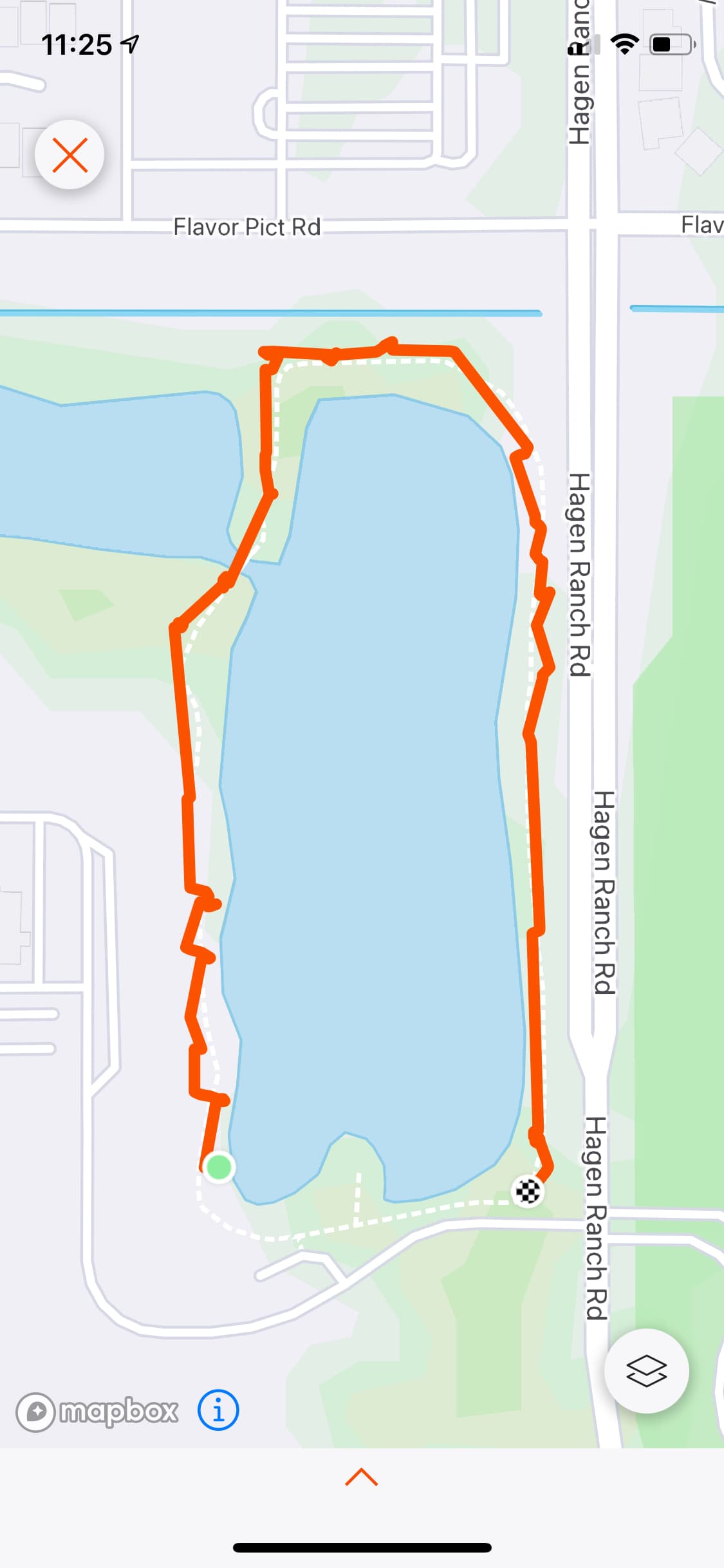
Both iWatch “Outdoor Walk” and iSmoothRun, which worked flawlessly to measure a 1k walk in 15 minutes, failed completely to measure a 1k walk in an hour and 15 minutes. Luckily, I had taken note of the “finish line” during the scouting walk, and drove Dave a short distance further before declaring his 1k finish.
Dave was a surprise hit with the numerous walkers and dog walkers, often bending to get just the right closeup with their phone’s camera. One particular “senior age” walker approached asking “Is that Dave?” He remarked that he has a collection of most of the Minions. His wife, never the less, was tugging on him to get back to their walk.
Not “geek” but rather totally rad, as in “radical” or “like a boss”.
Or like: “You gotta have a brass pair to be doing something like that in public!”
Charlie gives both you and Dave “two antennae up!!” and total props for making it happen despite all the challenges.
You should have gotten some Modular Robotics and/or Dexter Industries swag to hand out to spectators. The least they could have done was sponsor the walk.
Was anyone intelligently interested in the 'bot as a GoPiGo 'bot?
 )
)


 for him? Seems that’s what all the runs do now.
for him? Seems that’s what all the runs do now.