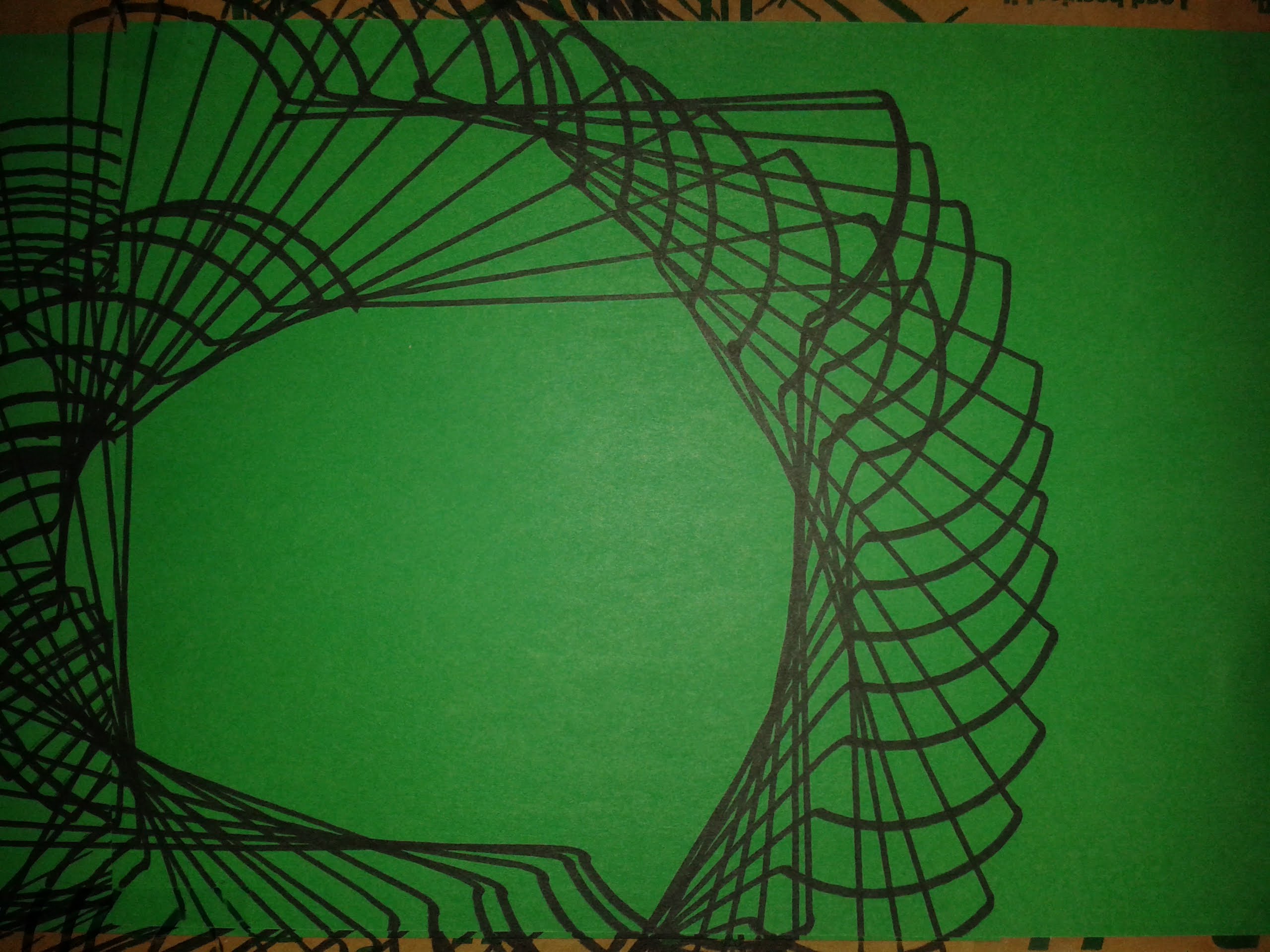
I’m very impressed by what the GPG3 does for the price. As an experiment, I attached a marker to one end, and did a simple loop of: (forward 15 cm, turn 90 degrees). Apparently the wheels slip a little bit on the paper so it does not draw a perfect square (this is running fairly slow, at 10% speed). The resulting drawing shows the turn wasn’t exactly 90 degrees.
Just curious: if I had the compass attachment to determine heading, could I get closer to an exact retrace, or would it still have this much drift each time around?
Thanks for your good words about the GoPiGo3. We’re proud of our little robot.
You are indeed right, both the code for the forward 15cm and turn 90 degrees do not result in a perfect calculation. There’s a bit of a leeway to cover cases of wheels not slipping with the same amount. It is fairly accurate, but not precise enough for surgery.
I am not sure if you’re using DexterOS with Bloxter, or if you’re in Raspbian for Robots. If you do use Raspbian for Robots, and since you control your own environment, you could change the way those 2 functions are written in easygopigo3.py and get them to be more precise.
The compass would also be of help - again in Python.