I’ve put a question direct to TalentCell about using the Tenergy 11.1v 3S 3A (P/N:1340) charger to charge the YB1203000 battery pack.
There is a statement on the BatteryUniversity site that is interesting:
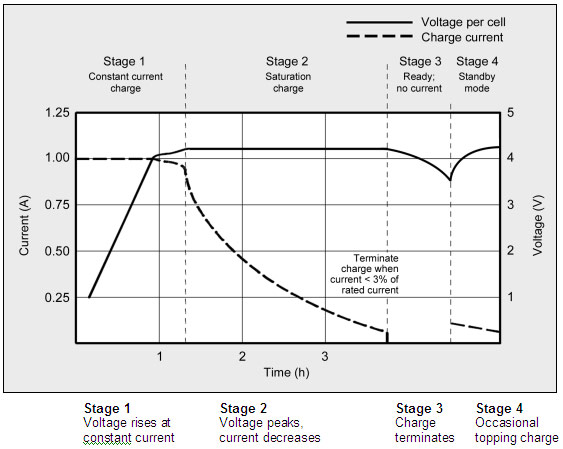
If charging at twice the current is only beneficial for the first third of the recharge process, the reduction in total charge time might not be that noticeable to be worth spending the $19.
The real question is charging current vs battery life. Like any other battery chemistry, a too rapid charge will overheat the batteries and shorten their lifetime.
The next thing to consider is that the batteries in these battery packs are not “naked”; they are controlled by a dedicated charge controller that is built into the battery pack itself. As a result, the external charger is not responsible for the charge profile - it’s the responsibility if the charge controller circuitry to maintain the correct charging profile vs temperature.
Therefore, the charge controller will only consume the actual power required for the batteries at a particular instant in time. Even if the charger could supply 25C, the charge controller won’t take any more power than it needs.
Translation:
It doesn’t matter, though I wouldn’t go below the current supplied by the TalentCell charger without better information.
This is an interesting subject - I asked TalentCell about this specifically, as my understanding of the battery’s internal BCS board functions are to
maintain balance during charging and discharging,
provide short and reverse polarity protection
provide regulated output
provide low voltage protection
so my question to them was “is the supplied adapter simply a voltage source, or does it manage the charging voltage/current delivery?”
Their answer was that the “charging adapter” indeed is the manager, and not the BCS.
The MR Li-Ion battery states a 3A max charging rate, so I also asked TalentCell if there were any negatives to using that specific 2A 3S Li-Ion “smart charger” with the specific MR 3000mAH TalentCell - they answered no negatives and that charger is compatible.
BUT, when I read that the constant current portion of the cycle is only for about the first third of the charging cycle, it became clear that doubling the max charging current from 1A to 2A was not going to halve the charging time, in fact only halving the first third of the cycle, it became clear that the supplied 1A charger is just fine - especially since Dave is not a 24/7 bot (yet).
Actually, it seems like it may be a long time before Dave will be smart enough to find his way home and dock, as there is so much to learn about with ROS2. I have been programming robots directly with each manufacturer’s “low-level” API (or my API in the case of my RugWarriorPi bot Pogo) for so many years, the concept of programming a robot with an “higher-level” API has been new and slow going. The basic concepts of ROS - nodes, topics, services, and actions are very easy to understand, but understanding what can be done with those concepts is the difference between understanding a programming language, and using the programming language to fly a space shuttle. (Or perhaps the difference between understanding a vocabulary of 12000 words, and writing Plato’s “Republic”)