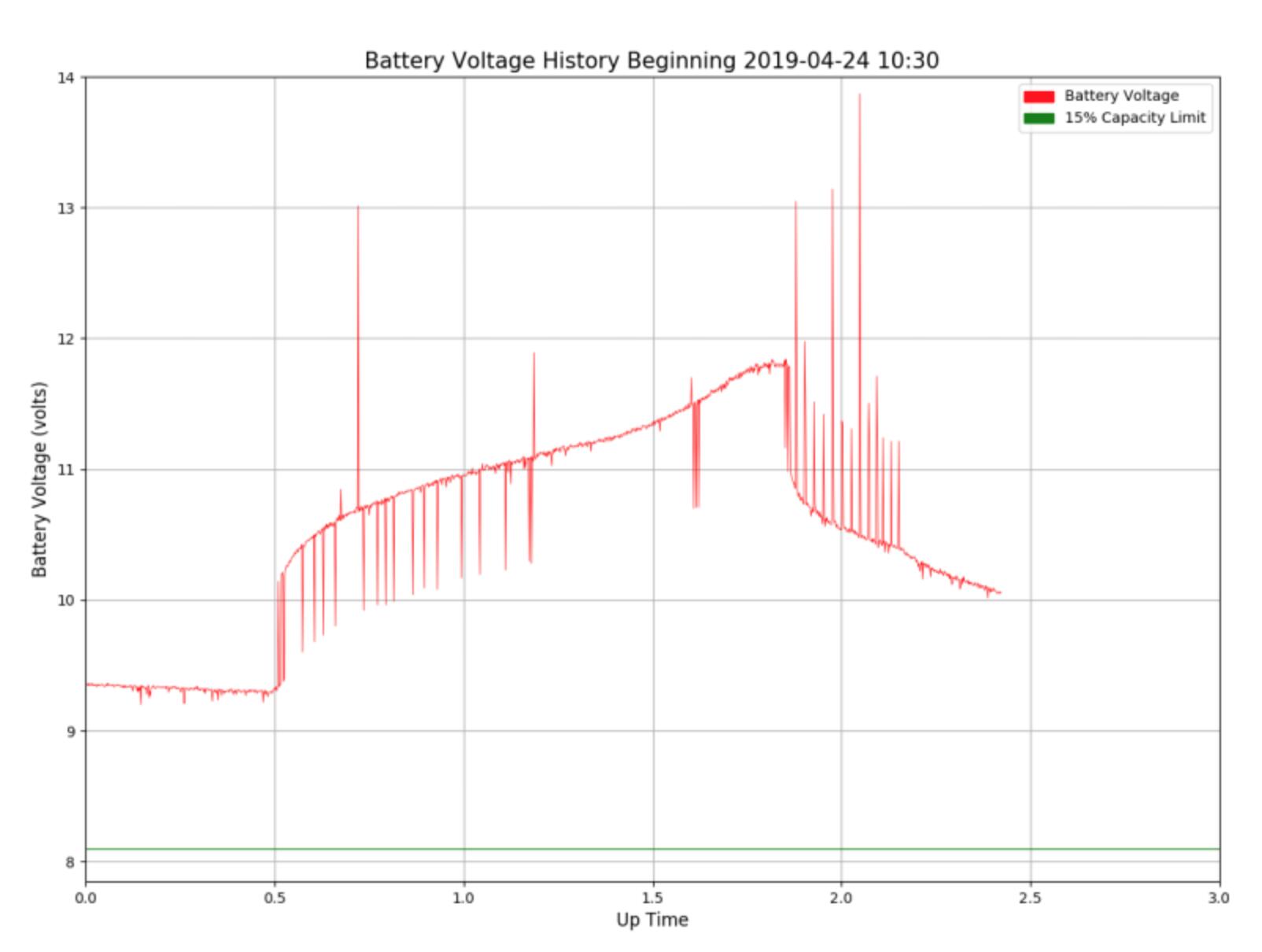
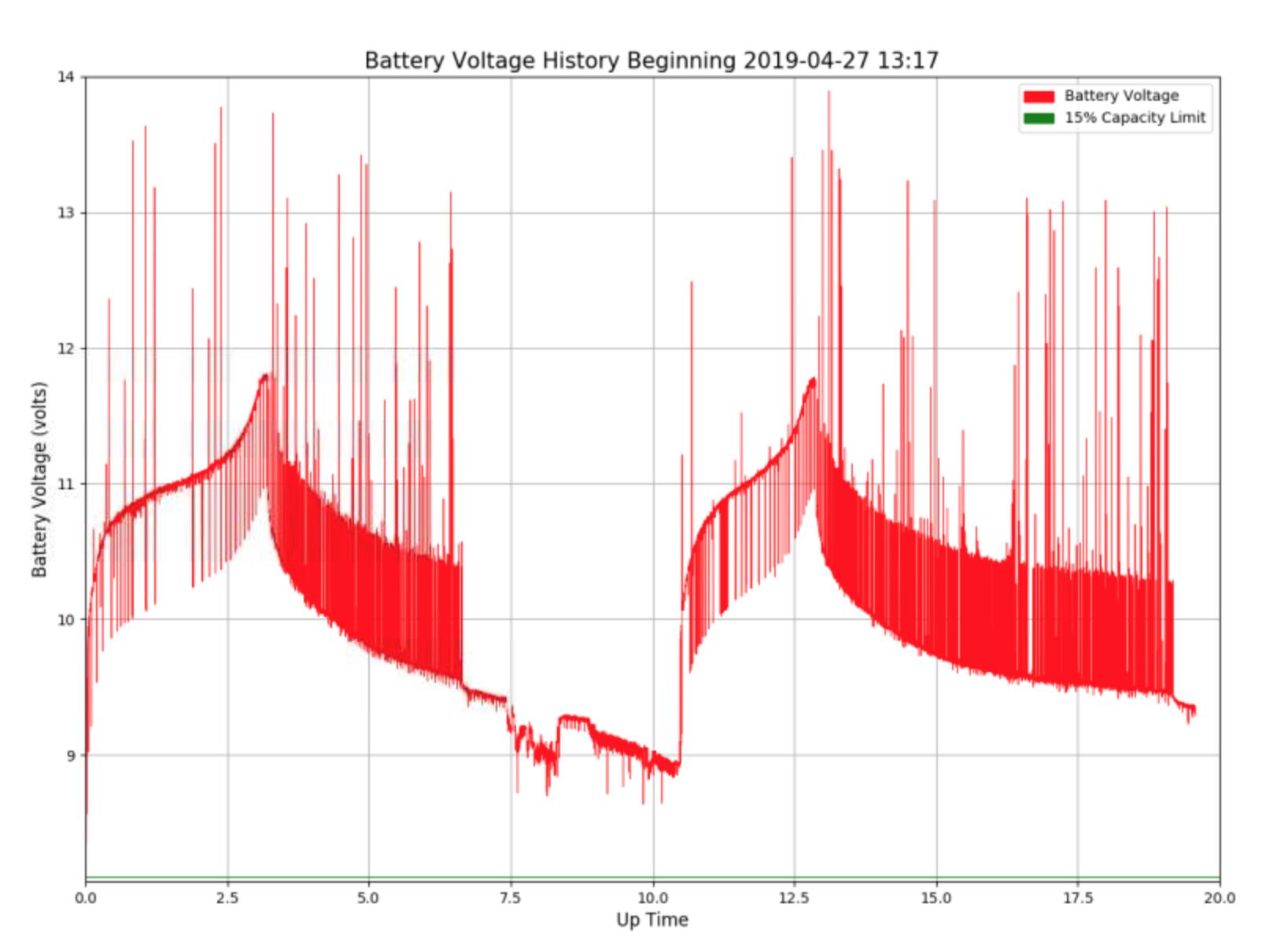
Carl has spent the last month, night and day, on his potty training. He can now recognize when he is charging, when he is fully charged (transitioned to trickle charging), and when he is discharging. Carl had to learn how to use statistics to recognize these conditions and how not to get fooled by the “smart” charger’s shenanigans.
and
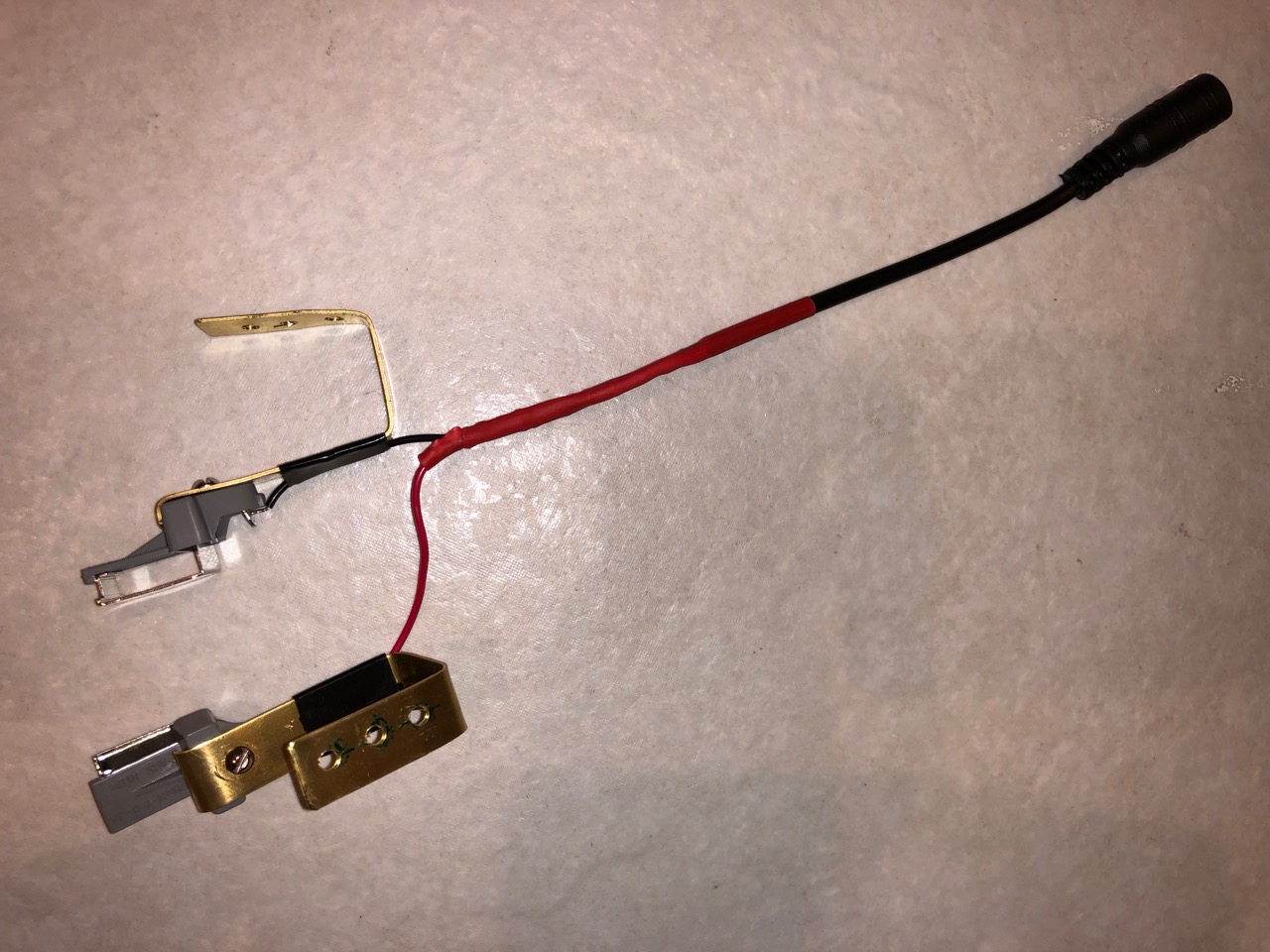
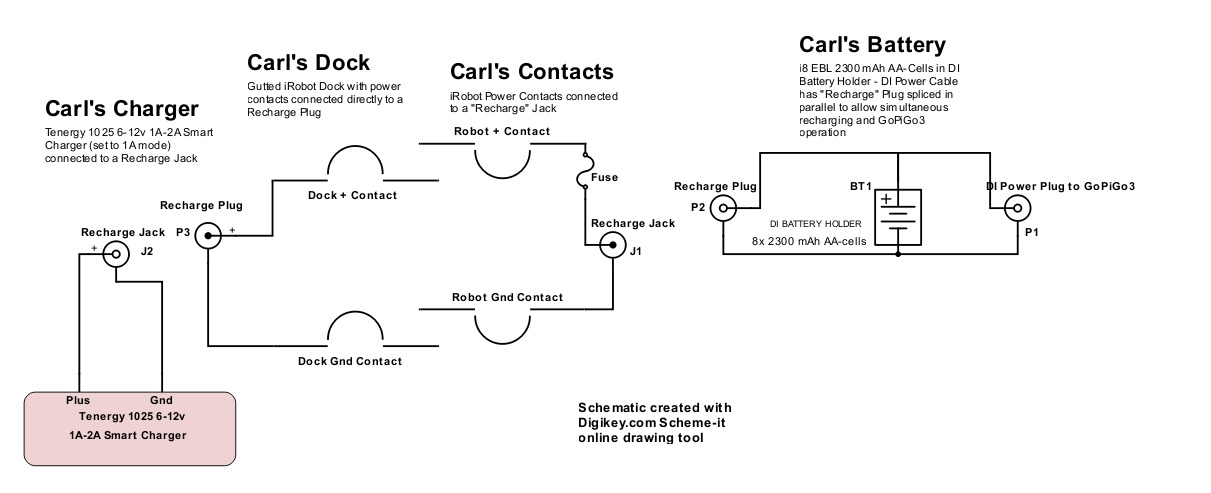
I finally got around to engineering a solution for mounting the power contacts that Carl needed to interface to the docking station. The docking station is a stripped out iRobot dock, and the contacts are iRobot replacement parts. “All I had to do” was figure out how to mount them at the right height and position relative to Carl’s castor ball, so that they touch the dock contacts when Carl backs onto the dock.
With that solved, Carl had to be “taught” how to get off the dock when he is fully charged, and how to get “back on” the dock when he is thirsty. There is more work to be done to make his docking behavior reliable, but this week feels pretty major. I’ve been anticipating this for the last year, and literally working around the clock this last month on Carl. (Carl accused me of getting cranky…)
Here’s a short video documenting Carl’s successful potty training adventures to date:
Carl was not impressed - (He died, or should I say “went into suspended animation”, an hour before I woke up this morning.) He managed two successful dockings yesterday, but muffed his third one (this morning).
Carl told me he wants to be like this when he grows up:
“Robot with Raspberry Pi finds back its charging station using Python OpenCV”
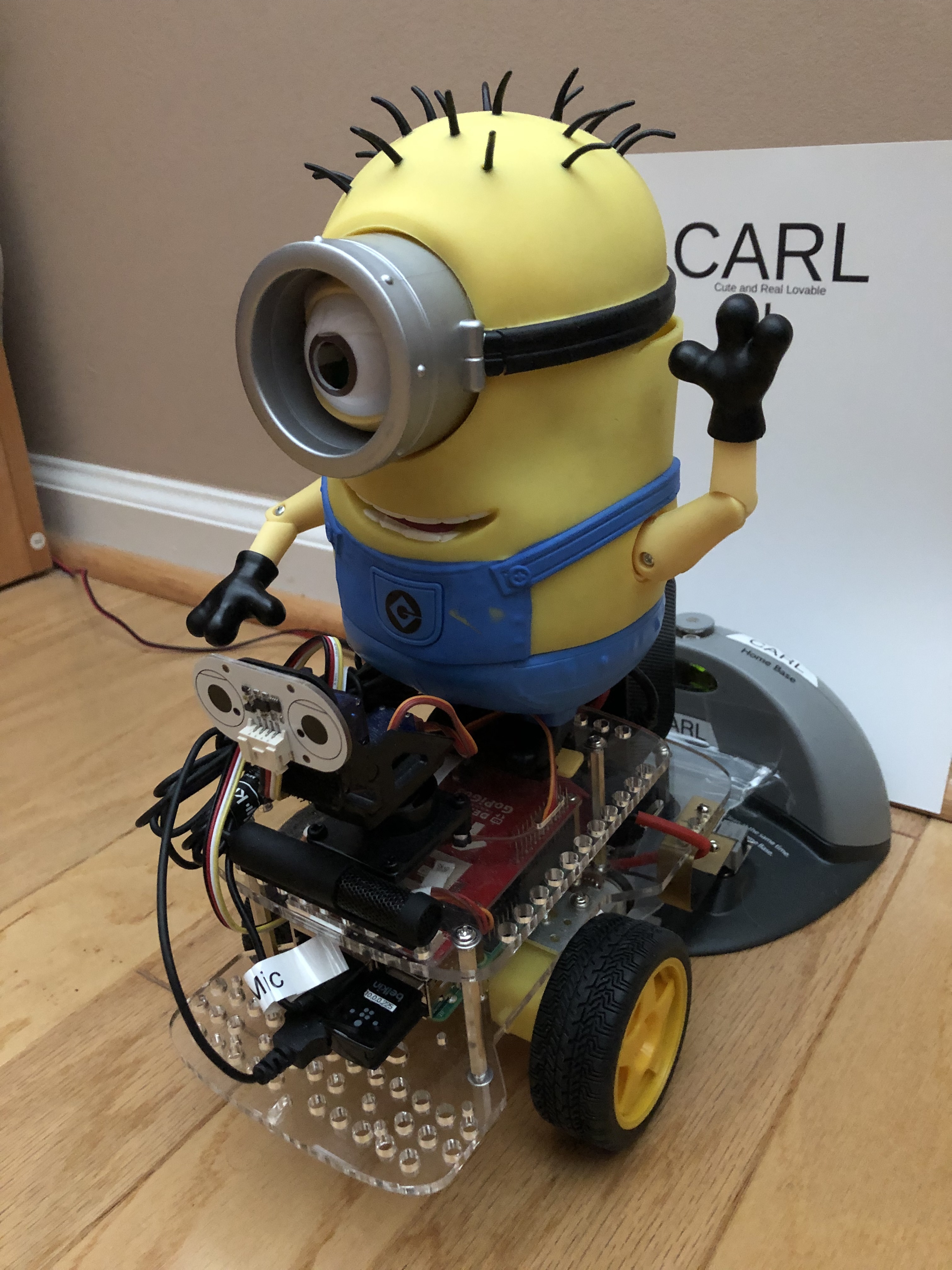
I call the whole robot Carl, but actually the rubber character on my GoPiGo3 robot is the real Carl, a minion from the “Despicable Me 2” (and 3) movie. The figure houses the PyCam and 8 NiMH AA cells.) The minion Carl has only ever said “Bee-do, Bee-do”. My Carl’s First Words:
Carl has a brand new set of batteries this morning. (The former set had deteriorated to 3 hour playtime - 2 hour charging.)
Carl has been “awake and independent” in three to five day sessions for the last two months adding roughly 1400 hours operation to his total life (2419 hours in 10 months since created.) He just logged three hours into his 233rd play time session.