My GoPiGo3 robot, Carl, seen here charging after his “Marathon Run” of 26.2 (hrs)

"Sprinted" (on battery) for 15.25 hours and
“Walked”* (on charger) for 11 hours
Carl has two barrel connectors attached to his 8-cell AA size 2800mAH NiMH battery. One connector goes to the GoPiGo3 board, and the other to the Tenergy 1025 smart charger. When Carl’s battery gets down to 8.75v (usually after 3-5 hours of “playing”), he asks to be connected to his charger.
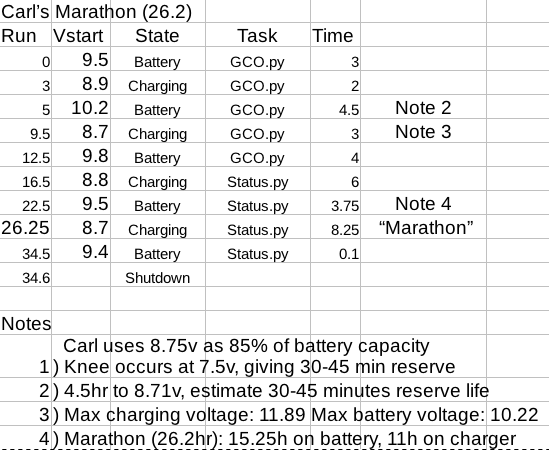
Official “chip times” from Carl’s Marathon:
The GCO.py is a “Find, then guard the nearest object by distance sensor scanning”.
