The link(https://www.dexterindustries.com/manual/imu-sensor/) for datasheets does not contain them. Could you please provide it or atleast the model numbers of gryoscope and accelerometer. Also, since the two sensors are fusion in the imu, could you also provide some information how it is fusion in the imu model. In particular, how the pinouts are associated.
Question - Would you tell a little about what for, and perhaps how, you are planning to use the IMU data?
Q) Any chance you will be attempting to track more than just rotational motion?
From my reading, it seems like most folks use 9DOF inertial measurement units for measuring rotation about an axis, but I have not found useful examples that use the dX, dY, dZ linear acceleration values. (Only research level fusion with some external reference like vision, GPS, or a second precision sensor like LIDAR. I only have encoders, one distance sensor, and the IMU on my robot.)
I am actually looking for possible types of applications. I believe, to determine the rotation measurements, the gyroscope would be enough but I am looking for how accelerometer readings can help or maybe how combinedly both can relatively more useful. Perhaps, I found the gyroscope readings to be not so clear enough (may be noisy) - unless, one is clear enough to select the wanted readings beforehand.
Since the likelihood of the GoPiGo, (et. al.), being moved tremendous distances sufficient to grossly affect calibration is small, there really ought to be a way to preserve the existing calibration from session to session.
This seems to be a problem with IMU/accelerometer sensors in general, as the micro:bit requires the same calibration, every stinkin’ time at power-up. Jeez! It’s not like I moved the beastie half way around the world to Hunan China or something.
Most commercial GPU navigators preserve some sense of their location session-to-session so that they have at least some clue as to where they are - and avoid a 5 minute seek-and-calibrate cycle every time the beastie is powered up.
Is there a way to read - and restore - the current calibration state of the IMU?
Update:
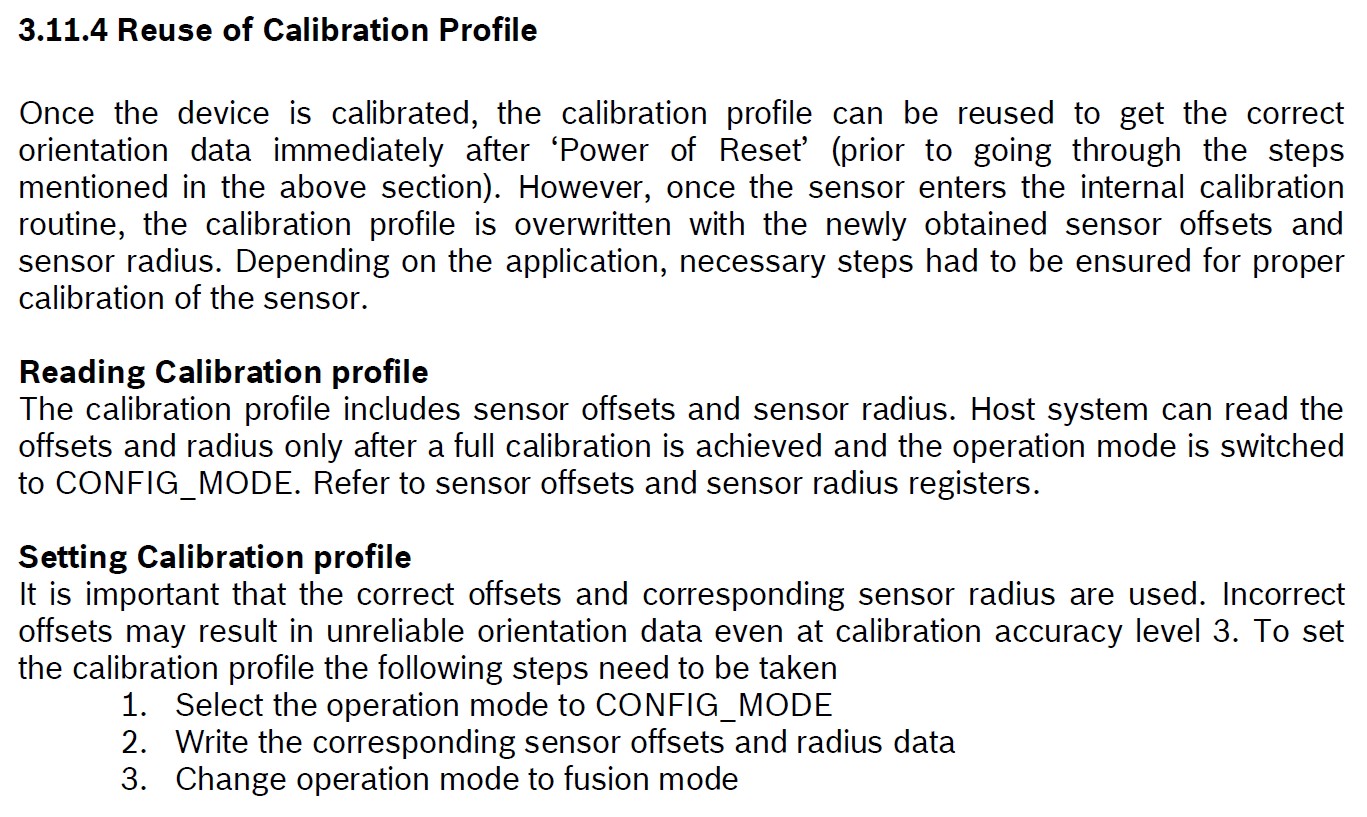
I found this in the datasheet for the IMU chip. Unfortunately, the PDF is “protected” so I could not copy the actual text, so I took a screen-snip.