DexterOS 2.4.0 is now available.
You can download it here or update the one you already have (if you’re already on DexterOS 2)
Internally, there’s a big change in how we handle communications. This means that the distance sensor behaves better (some people could get it into a state where it was no longer working until the next boot-up). It also means that you can have more than one distance sensor at the same time if you’re using Python! (note, this new feature is not accessible for now in Bloxter)
What is visible to all though is that you can now calibrate your GoPiGo3 if it doesn’t turn proper 90 degrees when asked to.
Calibration is needed because, due to factory and assembly variations, some constants may not be set to the proper values. Those constants are: 1) wheel diameter 2) distance between the two wheels. The new dialog lets you test out those values and adjust them accordingly. The GoPiGo3 will remember the new settings so this calibration only has to be done once.
Here’s the new dialog:
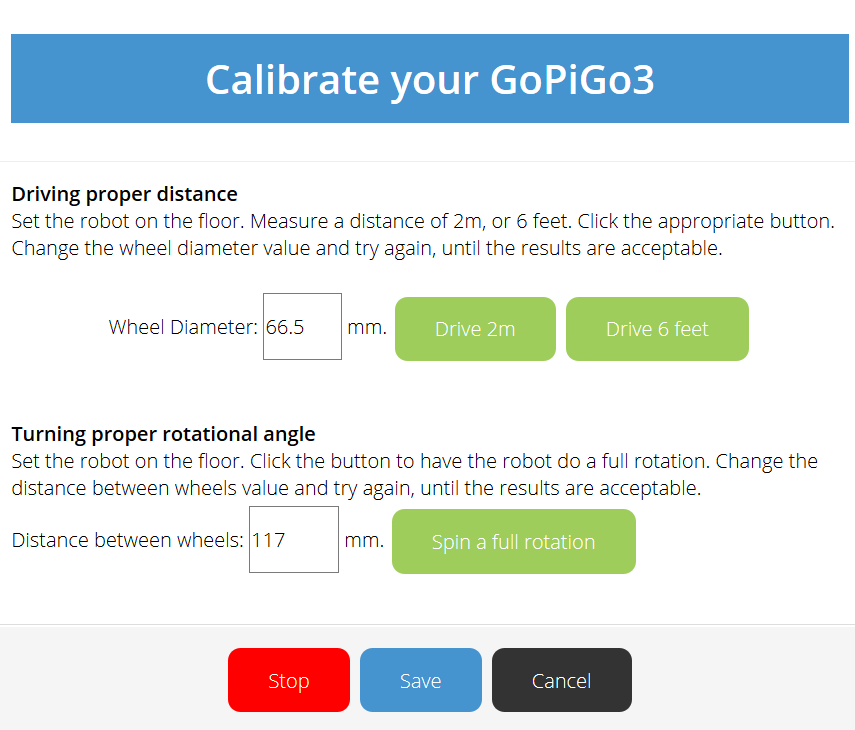
First part of calibration is to check the wheel diameter. Based on what we’re seeing, this is usually reliable. The best way to verify that is to see if the GoPiGo3 can drive 2m (or 6 feet if you prefer the US approach). Measure out 2m on the floor in a straight line. The robot should be able to drive that distance pretty precisely. The default value is 66.5 and is usually good unless you put something heavy onto your robot.
Second part is to check the distance between the two wheels. This is where we’re seeing the most variability. You can check if the GoPiGo3 is able to do a full rotation and adjust the value until you’re satisfied with the results. Default value is 117 mm, but we’re seeing cases where 125mm may be needed.
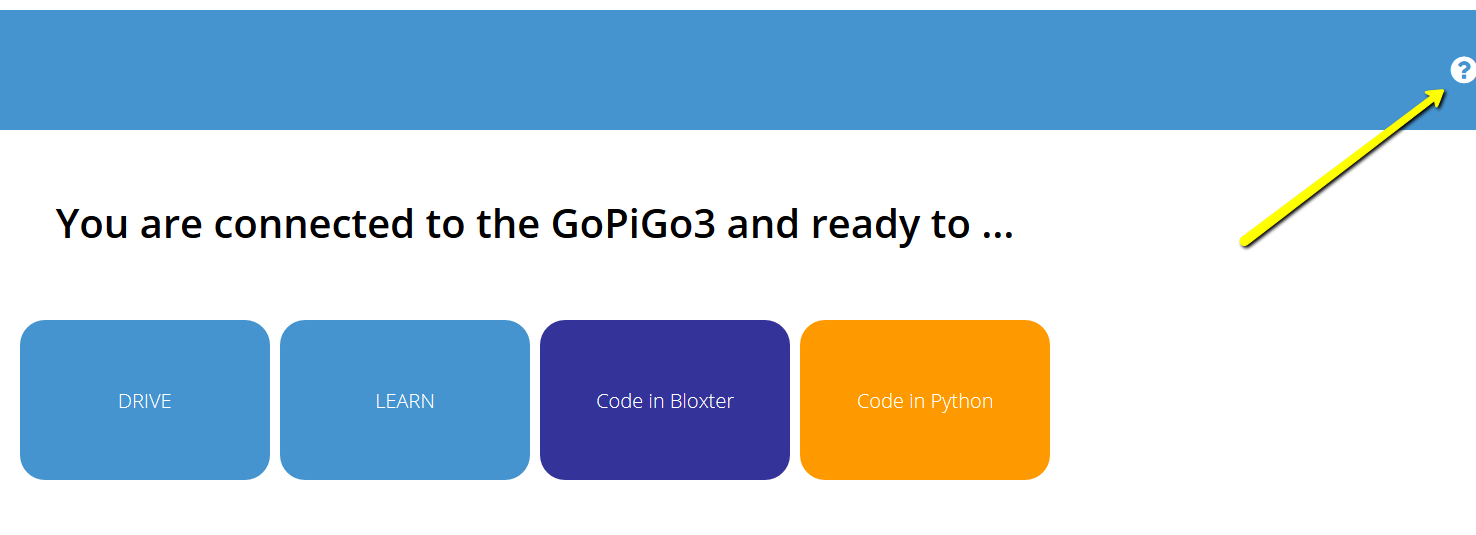
How to reach the calibration window:
From the main screen - the one with the four boxed choices - click on the ? icon at the top right.
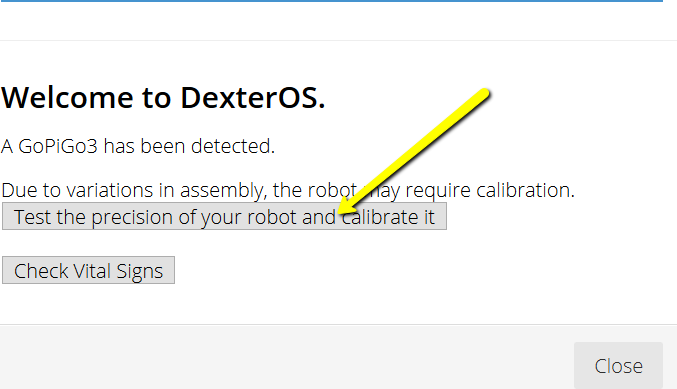
There’s a new button on the help screen to bring up the calibration screen for GoPiGo3.
Once calibrated, the GoPiGo3 should give you precise turns.
Cleo