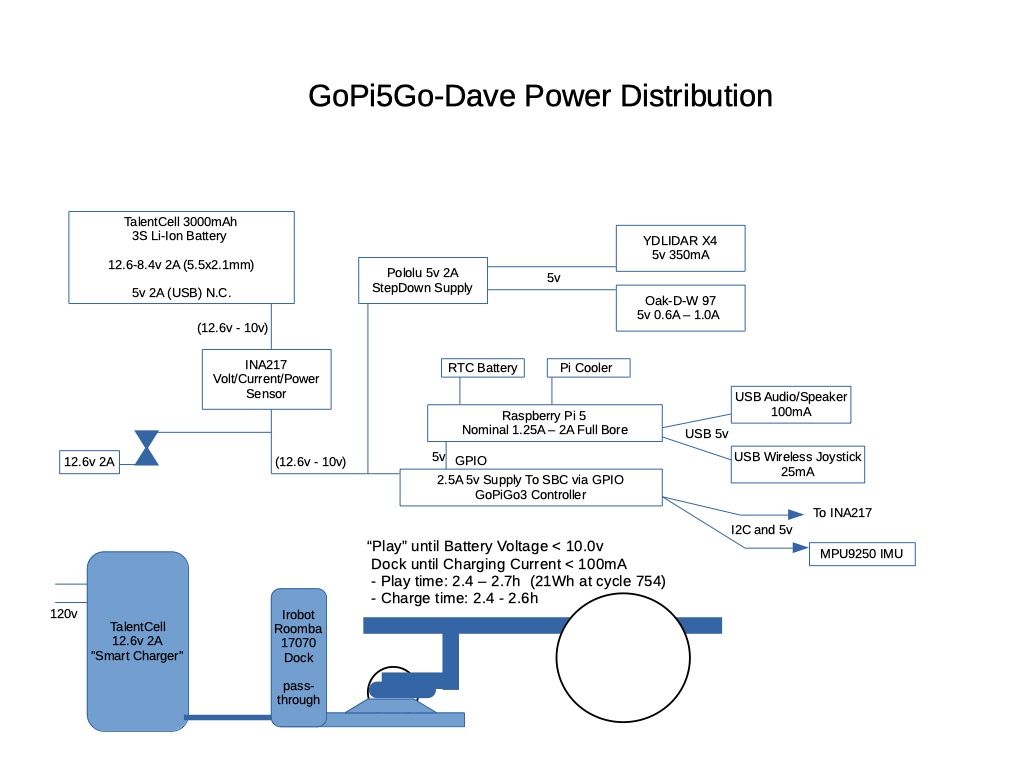
I finally got around to diagramming GoPi5Go-Dave’s Power Distribution. (Didn’t remember that I had not done it until today.)
1 Like
Have you considered an isolation diode between the charger and the rest of the robot?
I would also consider a low-pass pi-filter, (no pun intended!) between the Raspberry Pi and any noise sources.
Huh? The charger has to run the robot while charging the battery, so I don’t think it can be “isolated”. I guess I don’t understand.
Huh? How would I detect noise to the Raspberry Pi is causing a problem?
The only thing I wish I was smart enough to do, (but don’t have the desire to implement), is something that would only allow current to flow into the robot from the contacts, such that when the robot is not docked the contacts are not live with battery voltage. The charger and the robot would have to change, so it is in the too complicated category. I am not aware of any flat metal, raised floor surfaces in my house that would turn Dave into a fire hazard, and I am hoping the “battery short protection” would kick in if Dave finds such.
1 Like
A Schottky diode between the charging contacts and the rest of the circuit would accomplish both things.
It would:
- Isolate the contacts when not charging.
- Prevent the battery from back-feeding the charger if the robot is docked during a power failure.
The only issue is the 0.3/0.4 volt drop across the diode which would slightly reduce the charging voltage.
1 Like