We are looking for a few beta testers to play with our newest iteration of the GoPiGo operating system. A mix of old and new, GoPiGo OS answers the needs that our users have shared with us.
This is a BETA version!
Before you install this new image, please make sure your SD card is at least 16G in size. It’s a pretty big download too.
https://dexterindustries.com//downloads/gopigo_os_beta1
Wifi Connectivity
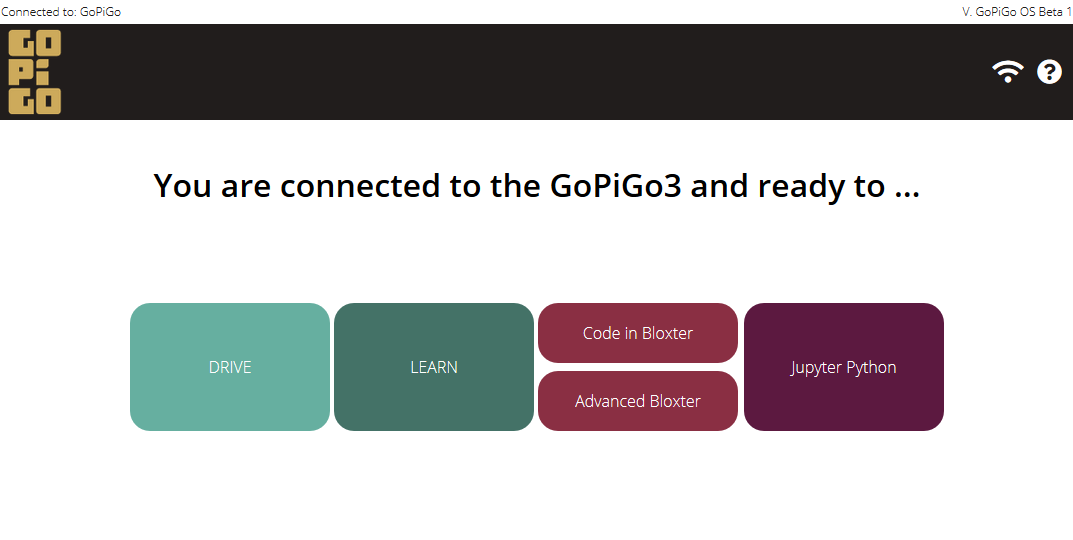
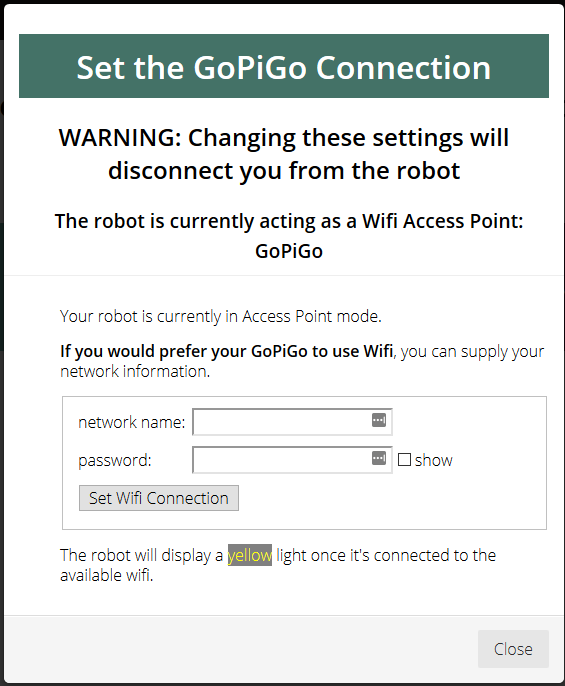
On the main page, you will notice a Wifi icon. You can switch GoPiGo OS from being its own access point, to being connected to your local wifi.
You will need to supply your Wifi information :
Here’s how to interpret the antenna LED colours:
-
Green: broadcasting an access point, and ready to accept connections
-
Blue: broadcasting an access point, and at least one person is connected
-
Yellow: not broadcasting an access point, and the robot is directly connected to the surrounding wifi. You may be able to connect to it via its hostname, or you can connect to it by using its IP address. The robot will let you know which IP address it got from the network if you plug earbuds directly in the Pi audio jack. Make sure to start listening when you switch modes.
Things to know about the wifi feature:
Every boot-up will be in Access Point mode, this allows you to take the robot with you, to school or a friend’s place, and always be able to talk to it. It also means that on every boot-up, you will have to connect to the robot access point and reconnect it to your home wifi.
If you know that the robot will always stay home, you can disable this and take full responsibility. Go to the Jupyter terminal and type in :
sudo systemctl disable start_as_access_point.service
Note that the jupyter user now has sudo access, and its password is still jupyter.

Should you ever need to take the robot elsewhere, you will have to remember to run
sudo systemctl enable start_as_access_point.service
before you leave!
Open system
GoPiGo OS is now open! Yes, we heard you! You are now free to SSH, or connect using a VNC viewer.
Things to know:
-
The option to use the browser as a vnc viewer is only available with Raspbian for Robots. However if installing a VNC viewer on your computer is an option, then Raspbian for Robots is no longer required.
-
The :1 that used to be necessary to connect to the VNC server is no longer needed. Just use the hostname or IP address directly.
-
The password stays the same: robots1234
-
The tools on the desktop are still the same.

Please note the limitation that you cannot switch from Access Point mode to Wifi mode through VNC. It has to be done via the browser.
Support for Pi4.
Yes, GoPiGo OS supports all versions of the Pi4. It is indeed running Buster and all PIs can be used from the Pi2 and up.
Fresh JupyterLab
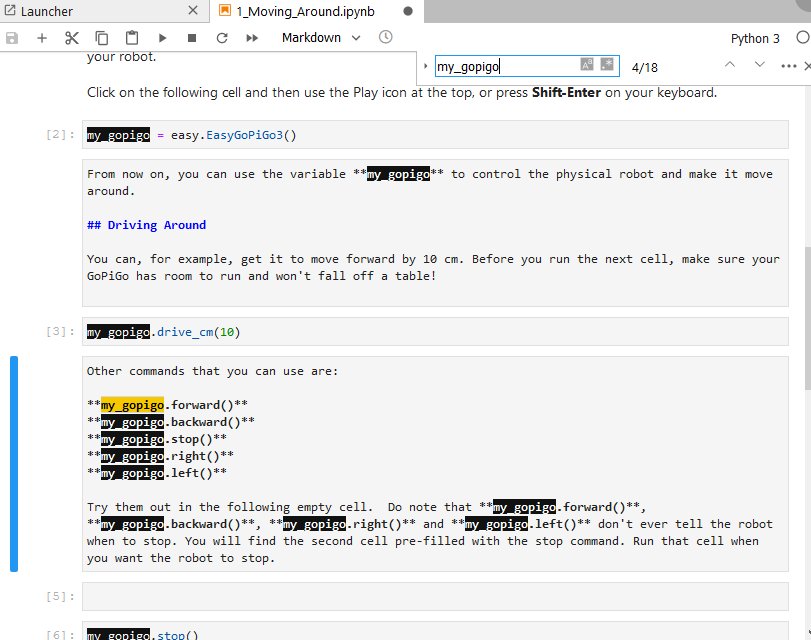
JupyterLab is currently running version 2.1.3 and we’re waiting with bated breath for the amazing JupyterLab 3.
In the meantime this version has the much-asked-for search option:
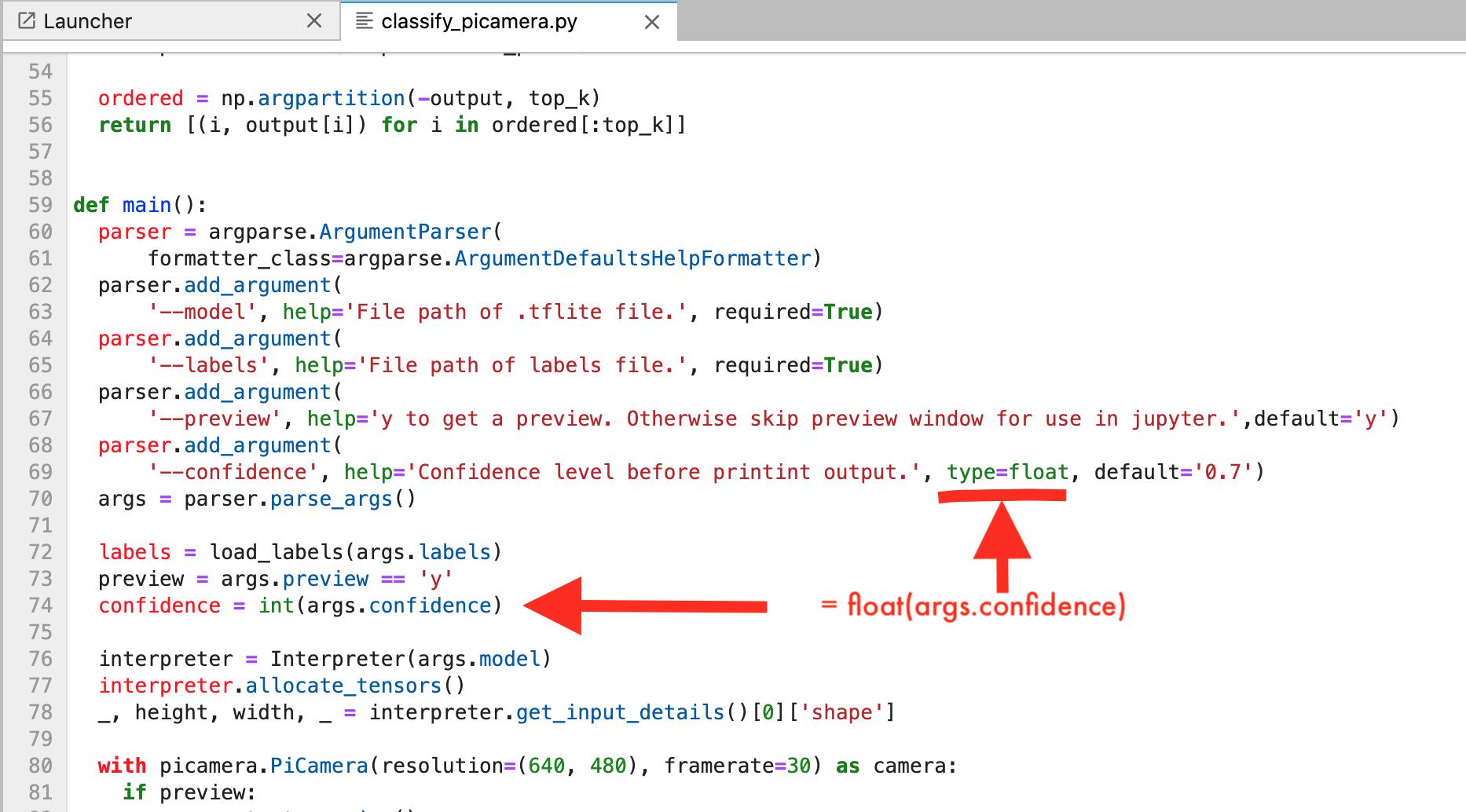
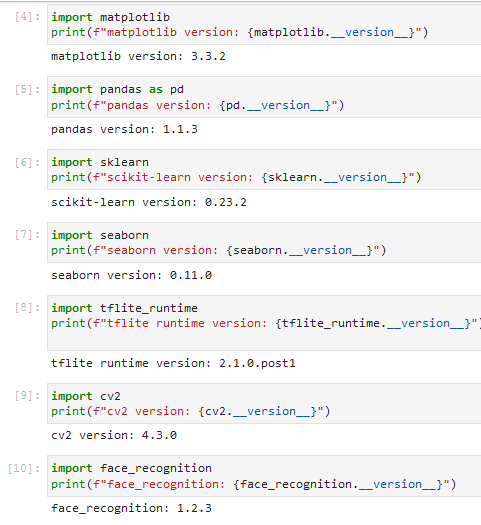
Fresh Python Libraries
The Python libraries have been updated to newer versions. Please note that tensorflow lite is now installed, and a face recognition library is available (see https://pypi.org/project/face-recognition/)
Drive Screen
If your robot has a camera, the drive screen will let you have a robot-eyes view so you can pester your sleeping dog (animal abuse strongly discouraged!)
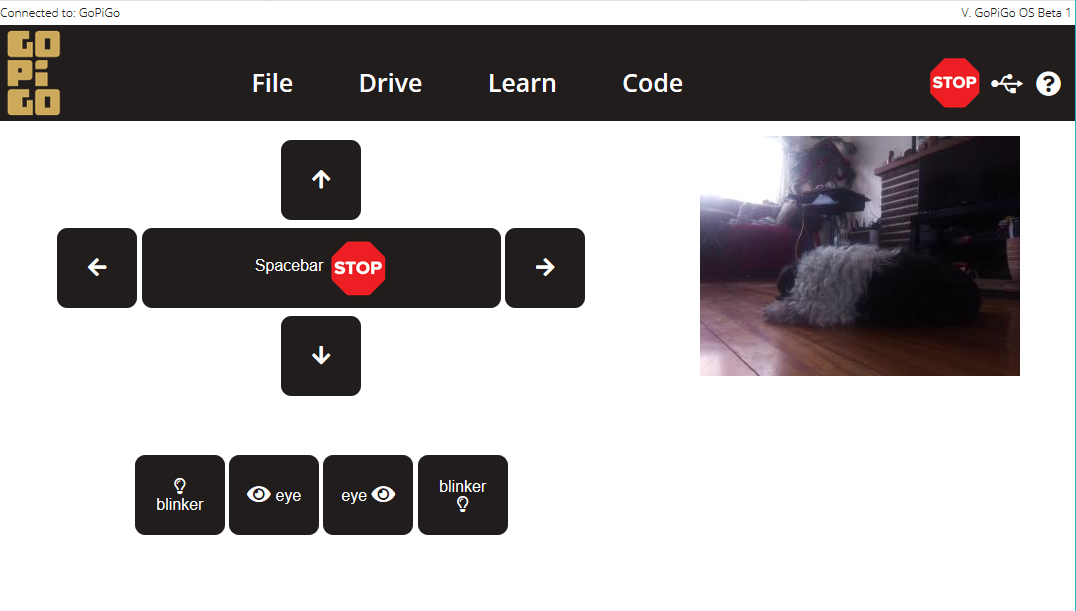
Combine this with the Wifi option, and you can connect your robot to the internet and let long-distance friends play with your dog! (this requires changes to your home router that we cannot help with.)
Python3 as the default
Both Python3 (3.7) and Python 2.7 are on the SD card. However, if you simply type ‘python’ you will find yourself in python3, not in python2. This is different than what is found on regular Raspberry Pi OS.
Battery Gauge
The battery gauge is gone. The new Li-ion battery keeps a steady voltage for a long time and the need to keep an eye on the battery level is no longer required. There’s plenty of power to last through a class or a workshop!
Python Lessons
The Python lessons under Learn / Python are currently missing. This is already known and will be remedied before the official release.
 ), or whatever, should do the exact same thing the “button-push” does - i.e. totally shut down the entire robot, including the controller.
), or whatever, should do the exact same thing the “button-push” does - i.e. totally shut down the entire robot, including the controller.