The GoPiGo robot servo function and method puts 0 degrees facing left, 90 degrees straight ahead, and 180 to the right. (I haven’t looked at the turning functions/methods.)
If I understand the ROS Wiki correctly, ROS (and iRobot) put the robot frame X axis straight ahead, Z up), with positive angles turn left (from the x axis/forward direction).
Currently, GoPiGo does not fix a Tilt reference. I am using horizontal as 0 degrees, with negative angles down, and positive angle up. ROS robotican tilt/pan head Wiki states positive moves head tilt down, which seems out of sync with the ROS Z positive up axis.
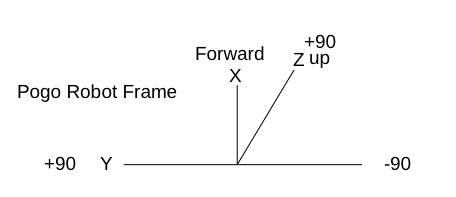
This is the reference I use on my robot:
This is not a complaint or judgement post, as there is no right or wrong, and no standards body saying “robot reference frame shall be …”. This is an observation for discussion.