Hello,
I am a beginner in python and got a GoPiGo3 to learn some programming. I assembled everything with a Raspberry Pi3 B+, installed Raspbian for Robots, can connect via Wifi to the Gopigo. Here is the problem:
I used the gopigo control panel to test if the robot is moving. Two problems occurred:
- When I press “forward” the wheels spin with different velocities, so the robot doesn’t follow a straight line.
- When I press “stop” the right wheel keeps spinning. Stops only when I turn off the Gopigo or start the “Demo” in “Test and Troubleshoot” and cancel that by Ctrl+C.
Any ideas on how to fix this? Is it neccessary to calibrate the motors in any way or do I have a hardware problem? How can I analyse this any further? The log file from test and troubleshoot should be attached.
Thank you very much in advance.
log.txt (387 Bytes)
Some things to try:
- make sure wheels are not jammed tight against the clear spacer (on axle between the wheel and motor)
- unplug and replug the right motor cable a few times
- Confirm that the tiny sensors around the magnet disk on the motors are close but not touching the disk.
(No calibration is needed or possible for speed mismatch under normal operation.)
@Stephan,
Have you checked that by using cyclicalobsessive’s suggestions?
Usually, when one wheel is rotating slower than the other one, that’s because the little black thing around the circular magnet on the motor (aka the encoder) is too far away from the disk. Pushing it closer to it should make it work again.
Thank you!
Thank your for your suggestions and sorry for not responding faster.
- I untightened the wheels a bit, but that didnt’ make any difference.
- I unpluged and pluged all motor cables a few times, didn’t change anything.
- I pushed all 4 encoders as close to the magnetic disks as possible, but that didn’t change anything.
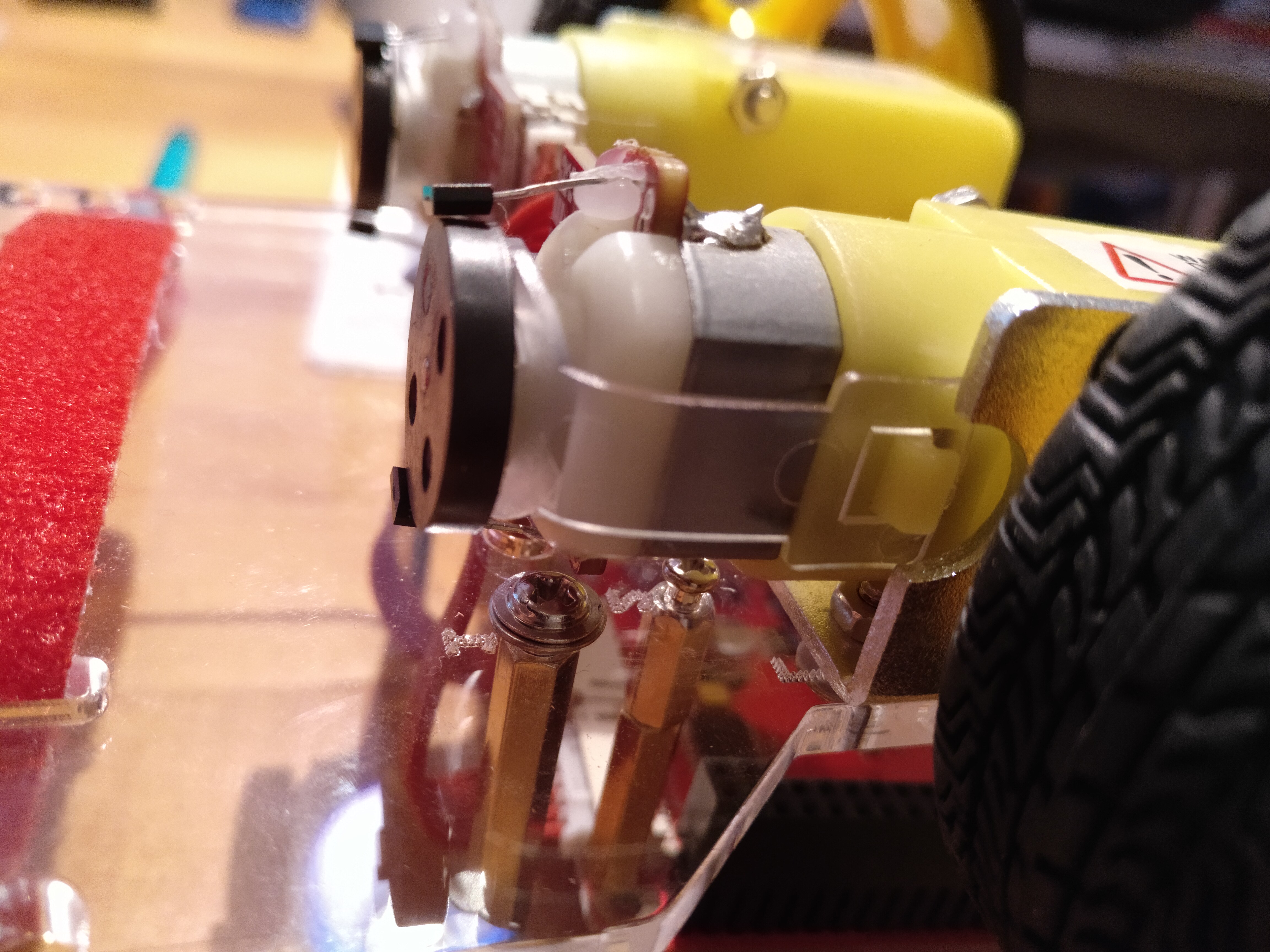
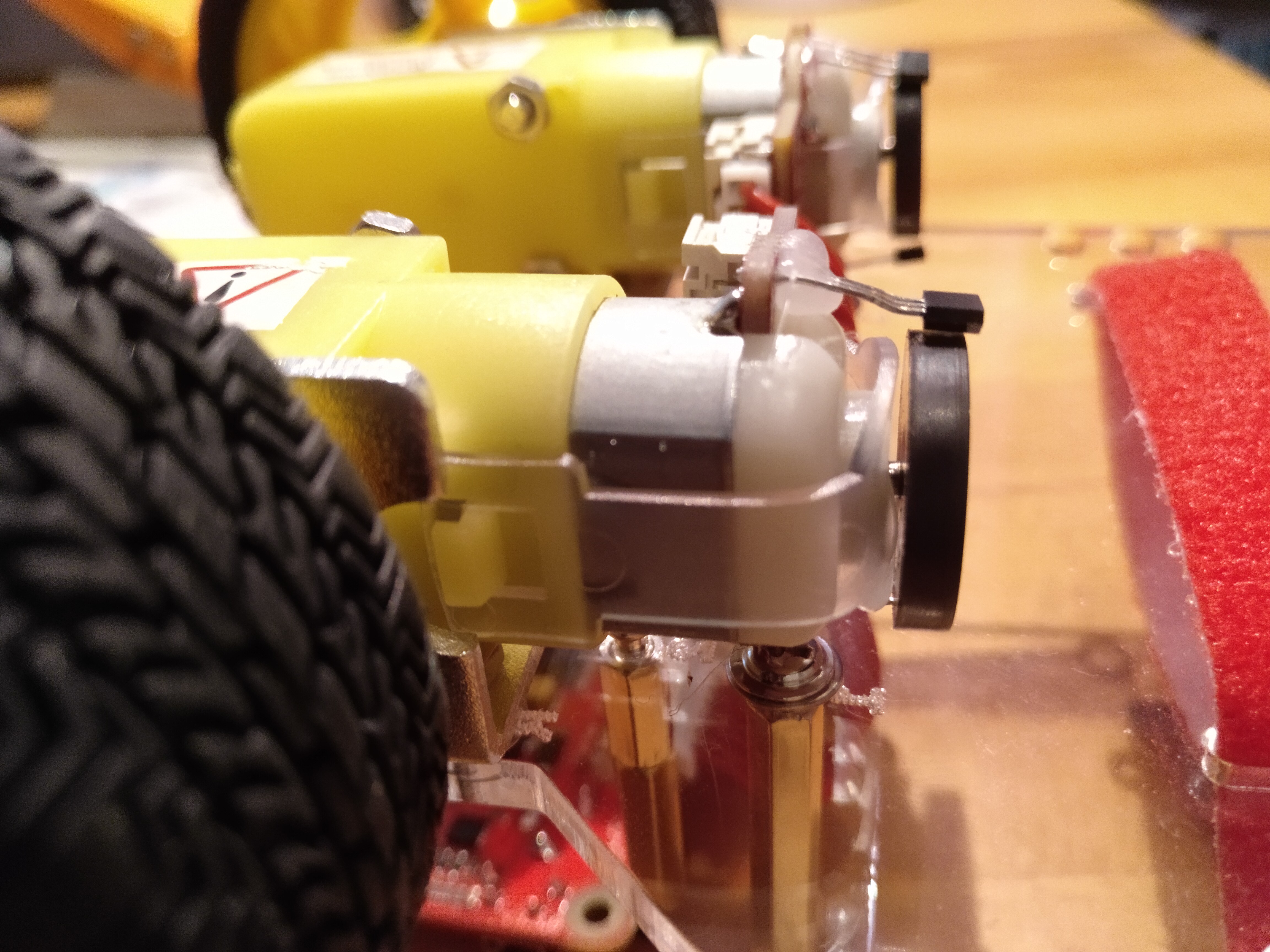
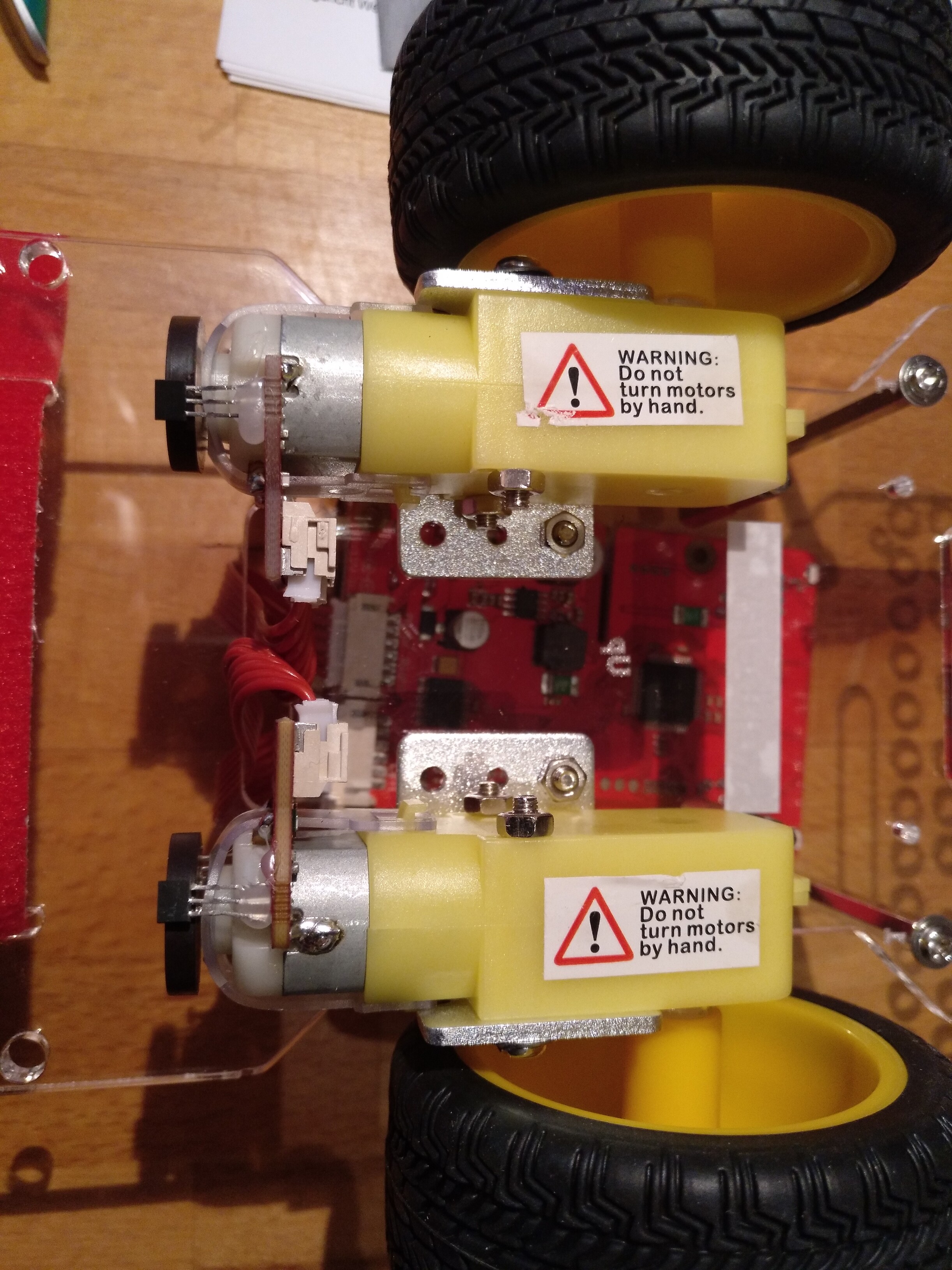
Okay, in this case, could you take a close up photo of each encoder along with the motor on each side? We want to see how the encoders look.
Thank you!
Here you go. I hope these images are ok. If you need anything else, let me know.
I have the same issue and the robot worked the last time we used it about a month ago.