I saw a tweet about Facebook open sourcing their pyrobot architecture layer which sits above the ROS software architecture.
This got me thinking about diagramming my GoPiGo3 Robot’s Architecture:
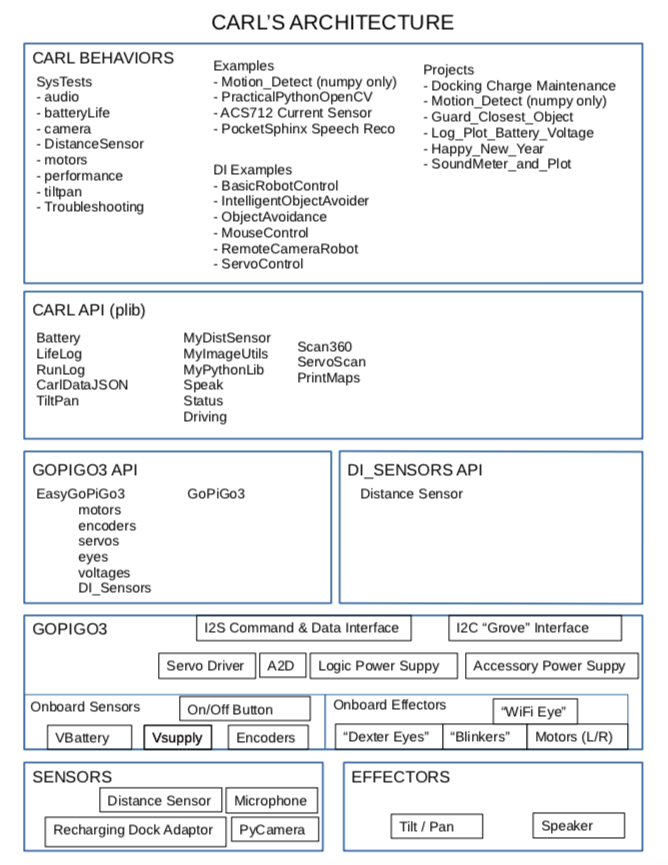
BTW, [u]Carl’s layers are “open source”[/u] with a big user community of one!