In the GoPiGo OS, there is a calibration section. You can change the apparent wheel diameter to “tune” the linear movement and you can change the apparent wheel-to-wheel spacing to “tune” rotational movement. I will try to dig up the exact web page that describes this and add to this post.
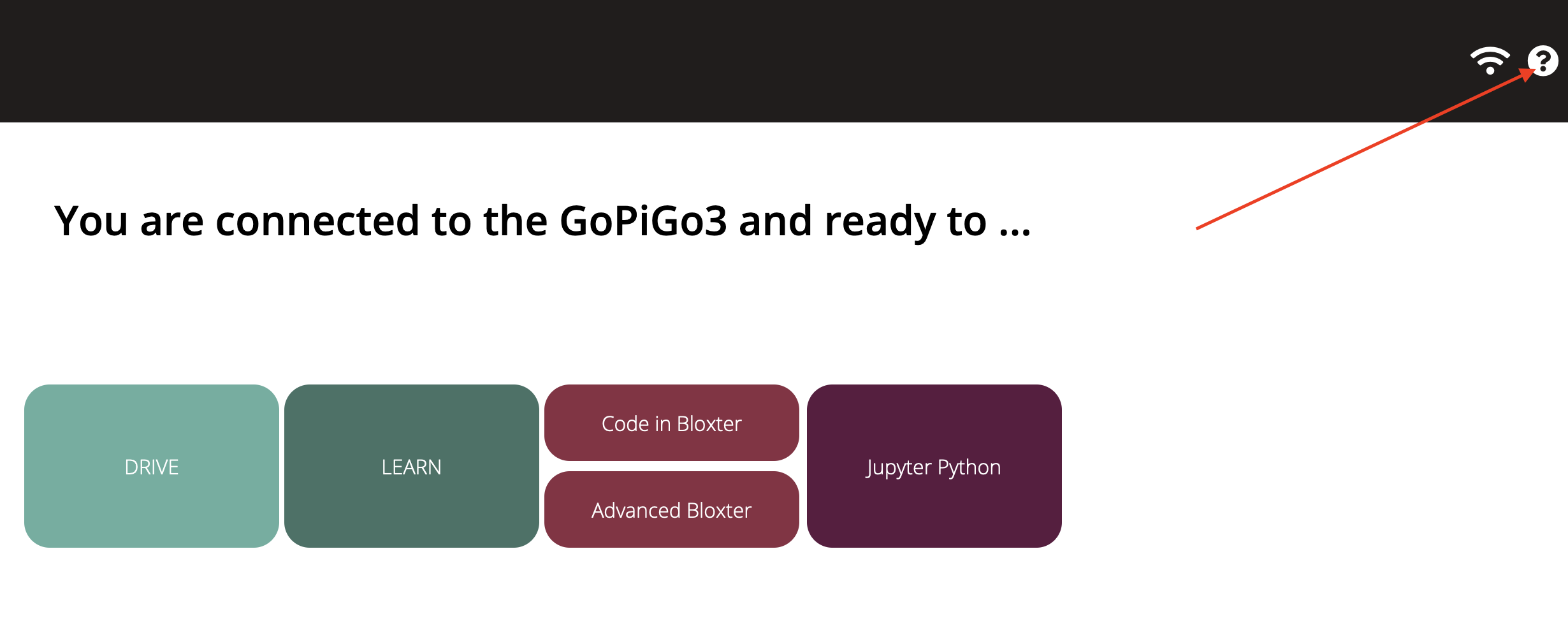
Never mind - I found it. For anyone else who is looking for the same thing, you click the ? icon next to the wi-fi icon in the upper right corner of the main GoPiGo screen.
I noticed your first screenshot was incomplete and was going to say look for the “?” in the upper right corner (Yeah, not obvious or that well documented) but glad you found it!