I saw several similar threads about this topic, however, I am unable to get the recommendations from previous responses to resolve my issue.
This is a new install. I have downloaded & booted to 2019.04.05_Raspbian_For_Robots_by_Dexter_Industries_Stretch
as my starting point.
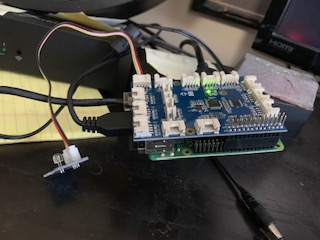
The install all appears to work properly, no obvious errors in log review. Updates appear to work. When I run the “sudo python grove_led_blink.py” line with my led plugged into D4, the light does not blink.
Here is the output from the log file & my pic of the install.
Check space left
Filesystem Size Used Avail Use% Mounted on
/dev/root 59G 3.7G 54G 7% /
devtmpfs 433M 0 433M 0% /dev
tmpfs 438M 5.8M 432M 2% /dev/shm
tmpfs 438M 12M 426M 3% /run
tmpfs 5.0M 4.0K 5.0M 1% /run/lock
tmpfs 438M 0 438M 0% /sys/fs/cgroup
/dev/mmcblk0p1 42M 23M 19M 55% /boot
tmpfs 88M 4.0K 88M 1% /run/user/1000
Check for dependencies
python 2.7.13-2 install ok installed
python-pip 9.0.1-2+rpt2 install ok installed
git 1:2.11.0-3+deb9u4 install ok installed
libi2c-dev 3.1.2-3 install ok installed
python-serial 3.2.1-1 install ok installed
python-rpi.gpio 0.6.5~stretch-1 install ok installed
i2c-tools 3.1.2-3 install ok installed
python-smbus 3.1.2-3 install ok installed
arduino 2:1.0.5+dfsg2-4.1 install ok installed
minicom 2.7-1.1 install ok installed
scratch 1.4.0.6~dfsg1-5 install ok installed
find: â/run/user/1000/gvfsâ: Permission denied
find: â/proc/1064/task/1064/netâ: Invalid argument
find: â/proc/1064/netâ: Invalid argument
find: â/proc/1065/task/1065/netâ: Invalid argument
find: â/proc/1065/netâ: Invalid argument
wiringPi Found
find: â/run/user/1000/gvfsâ: Permission denied
find: â/proc/1064/task/1064/netâ: Invalid argument
find: â/proc/1064/netâ: Invalid argument
find: â/proc/1065/task/1065/netâ: Invalid argument
find: â/proc/1065/netâ: Invalid argument
wiringPi Found
I2C already removed from blacklist
SPI already removed from blacklist
Check for addition in /modules
I2C-dev already there
i2c-bcm2708 already there
spi-dev already there
Hardware revision
gpio version: 2.36
Copyright © 2012-2015 Gordon Henderson
This is free software with ABSOLUTELY NO WARRANTY.
For details type: gpio -warranty
Raspberry Pi Details:
Type: Pi 3, Revision: 02, Memory: 1024MB, Maker: Sony
- Device tree is enabled.
*–> Raspberry Pi 3 Model B Rev 1.2 - This Raspberry Pi supports user-level GPIO access.
Check the /dev folder
i2c-1
spidev0.0
spidev0.1
ttyAMA0
USB device status
Bus 001 Device 005: ID 045e:0745 Microsoft Corp. Nano Transceiver v1.0 for Bluetooth
Bus 001 Device 004: ID 04f2:1060 Chicony Electronics Co., Ltd
Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast Ethernet Adapter
Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp. SMC9514 Hub
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=dwc_otg/1p, 480M
|__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/5p, 480M
|__ Port 1: Dev 3, If 0, Class=Vendor Specific Class, Driver=smsc95xx, 480M
|__ Port 3: Dev 4, If 0, Class=Human Interface Device, Driver=usbhid, 1.5M
|__ Port 3: Dev 4, If 1, Class=Human Interface Device, Driver=usbhid, 1.5M
|__ Port 5: Dev 5, If 0, Class=Human Interface Device, Driver=usbhid, 12M
|__ Port 5: Dev 5, If 1, Class=Human Interface Device, Driver=usbhid, 12M
|__ Port 5: Dev 5, If 2, Class=Human Interface Device, Driver=usbhid, 12M
Raspbian for Robots Version
V 9
This version of Raspbian was modified by Dexter Industries on the Jessie Raspbian Build.
This version was updated on 26th of June 2018.
Hostname
dex
Checking for Atmega chip
avrdude: Version 5.10, compiled on Jun 18 2012 at 12:38:29
Copyright © 2000-2005 Brian Dean, http://www.bdmicro.com/
Copyright © 2007-2009 Joerg Wunsch
System wide configuration file is "/etc/avrdude.conf"
User configuration file is "/root/.avrduderc"
User configuration file does not exist or is not a regular file, skipping
Using Port : unknown
Using Programmer : gpio
AVR Part : ATMEGA328P
Chip Erase delay : 9000 us
PAGEL : PD7
BS2 : PC2
RESET disposition : dedicated
RETRY pulse : SCK
serial program mode : yes
parallel program mode : yes
Timeout : 200
StabDelay : 100
CmdexeDelay : 25
SyncLoops : 32
ByteDelay : 0
PollIndex : 3
PollValue : 0x53
Memory Detail :
Block Poll Page Polled
Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack
----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- ---------
eeprom 65 5 4 0 no 1024 4 0 3600 3600 0xff 0xff
flash 65 6 128 0 yes 32768 128 256 4500 4500 0xff 0xff
lfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
hfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
efuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
lock 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00
signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00
Programmer Type : GPIO
Description : Use sysfs interface to bitbang GPIO lines
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e950f
avrdude: safemode: lfuse reads as FF
avrdude: safemode: hfuse reads as DA
avrdude: safemode: efuse reads as 5
avrdude: safemode: lfuse reads as FF
avrdude: safemode: hfuse reads as DA
avrdude: safemode: efuse reads as 5
avrdude: safemode: Fuses OK
avrdude done. Thank you.
Checking I2C bus for devices
Checking I2C bus 0
Error: Could not open file /dev/i2c-0' or /dev/i2c/0’: No such file or directory
Checking I2C bus 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: – 04 – -- – -- – -- – -- – -- –
10: – -- – -- – -- – -- – -- – -- – -- – --
20: – -- – -- – -- – -- – -- – -- – -- – --
30: – -- – -- – -- – -- – -- – -- – -- – --
40: – -- – -- – -- – -- – -- – -- – -- – --
50: – -- – -- – -- – -- – -- – -- – -- – --
60: – -- – -- – -- – -- – -- – -- – -- – --
70: – -- – -- – -- – --
Checking for firmware version
GrovePi has firmware version: 1.4.0
===== EOF =====
Thanks in advance for the suggestions.
Curtis