I have to confess I am puzzled too, though I have been busy this last few days wasting time running down rat-holes due to crappy hardware - my microSD to USB “dongle” adapter. . .
. . . decided to go all pear-shaped on me and so I inadvertently generated a bunch of trash images that I’ve been testing against. Tomorrow I go out and get another adapter that actually costs some money and isn’t a piece of GAGH!
Regarding the “Pi-4 nukes a GoPiGo-3 board” issue I described.
The only similarity between the two is that they both use the same processor family. In the case of the GoPiGo-3 controller board, Dexter Industries actually brought out a couple of pins, specifically the SWDIO and SWDCLK on GPIO physical pins 18 and 22, to use as a “sideways” JTAG interface where the Raspberry Pi could upload firmware updates to the 'bot.
As far as I know, (and my knowledge here is quite limited), I do not believe that the ability to update the Grove-Pi firmware was ever implemented. (I also don’t have any schematics or other Grove-Pi documentation either.)
Even if that DOES exist, enabling that interface isn’t a simple task.
I would need to do a lot more research before I’d point my finger at that as a root cause.
I found this:
Here’s a schematic:
GrovePi+ v3.0.pdf.txt (75.7 KB)
There’s a bunch of other, interesting, data on that site too.
There does not appear to be any provision for any kind of JTAG connection for flashing firmware, though there are SPI and i2c connections.
Based on my (very) quick look at the schematic, a Grove Pi is nothing more than a level-shifting interface multiplexer board. I think SparkFun has something similar that uses their Qwik connector format.
I guess I am at a loss too.
Have you tried this ultrasonic device on anything else?
Is this for 3v or 5v i2c?
I’ll be happy to take a closer look, but it won’t be for a couple of days or so.
=====================
Update:
Apparently the GrovePi can have it’s firmware updated!
(Item 6 on the page above)
What I would try:
- Get a different Raspberry Pi board, (Nothing later than a 3B+)
- Download Raspbian for Robots, but do not update it. (i.e. Don’t do an apt-update or apt-upgrade.)
- Connect the GrovePi to the Raspberry Pi board
- Go to Dexter Update and select “Update Firmware”. Make sure “GrovePi” is the “Detected Robot”
- Give it a try!
Important caveat:
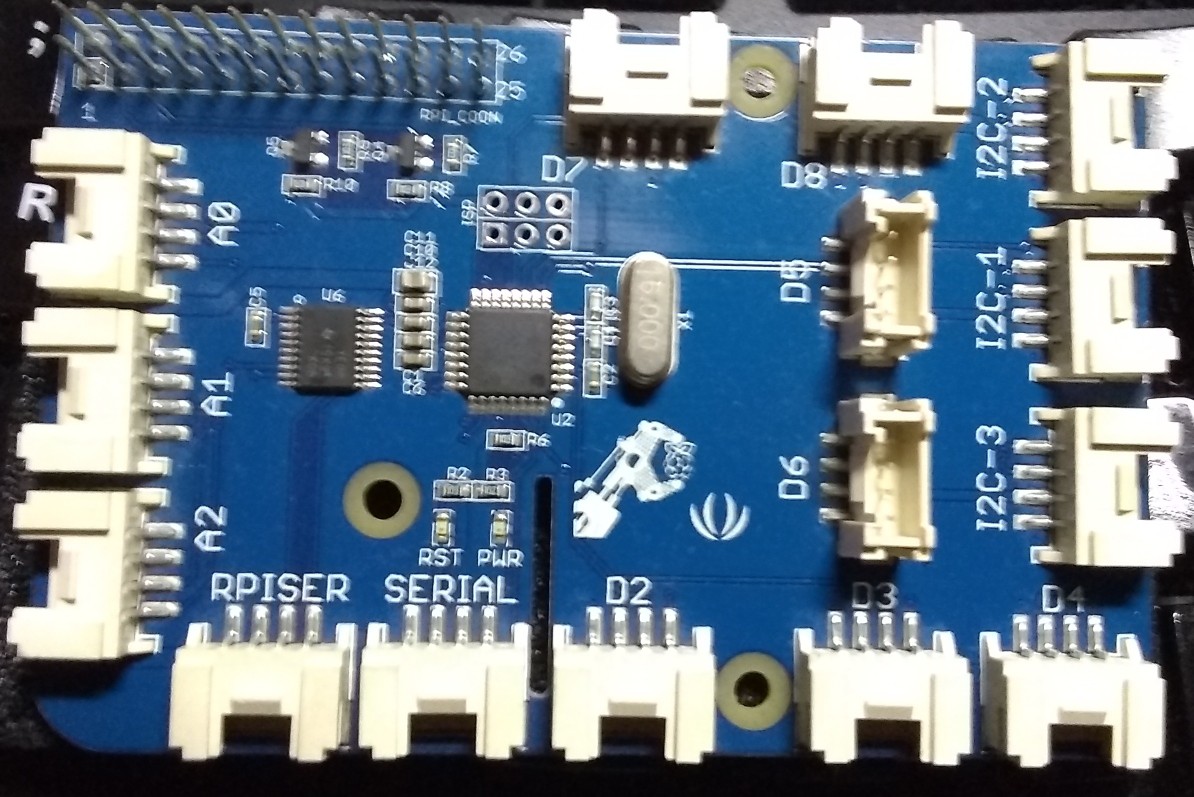
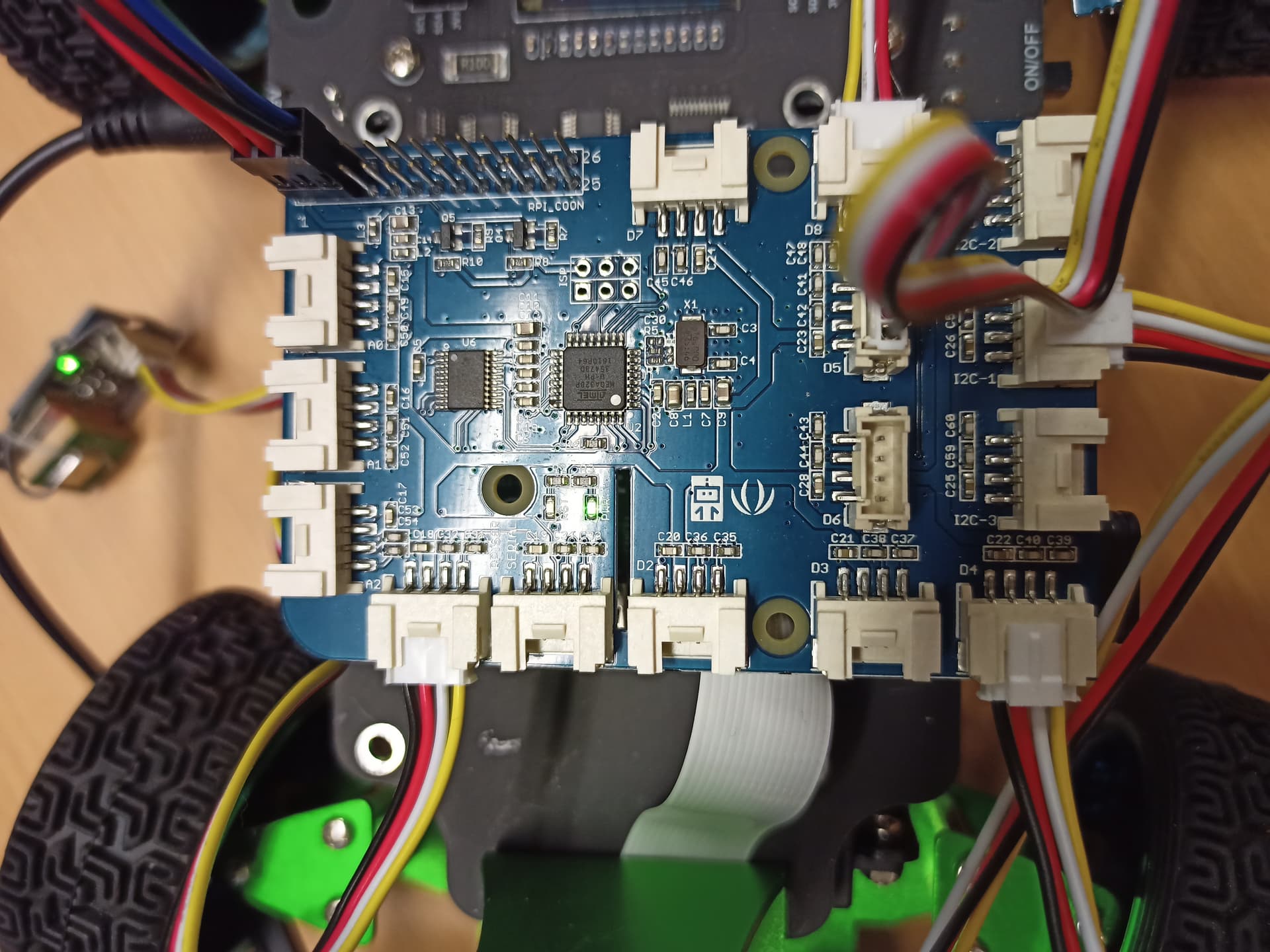
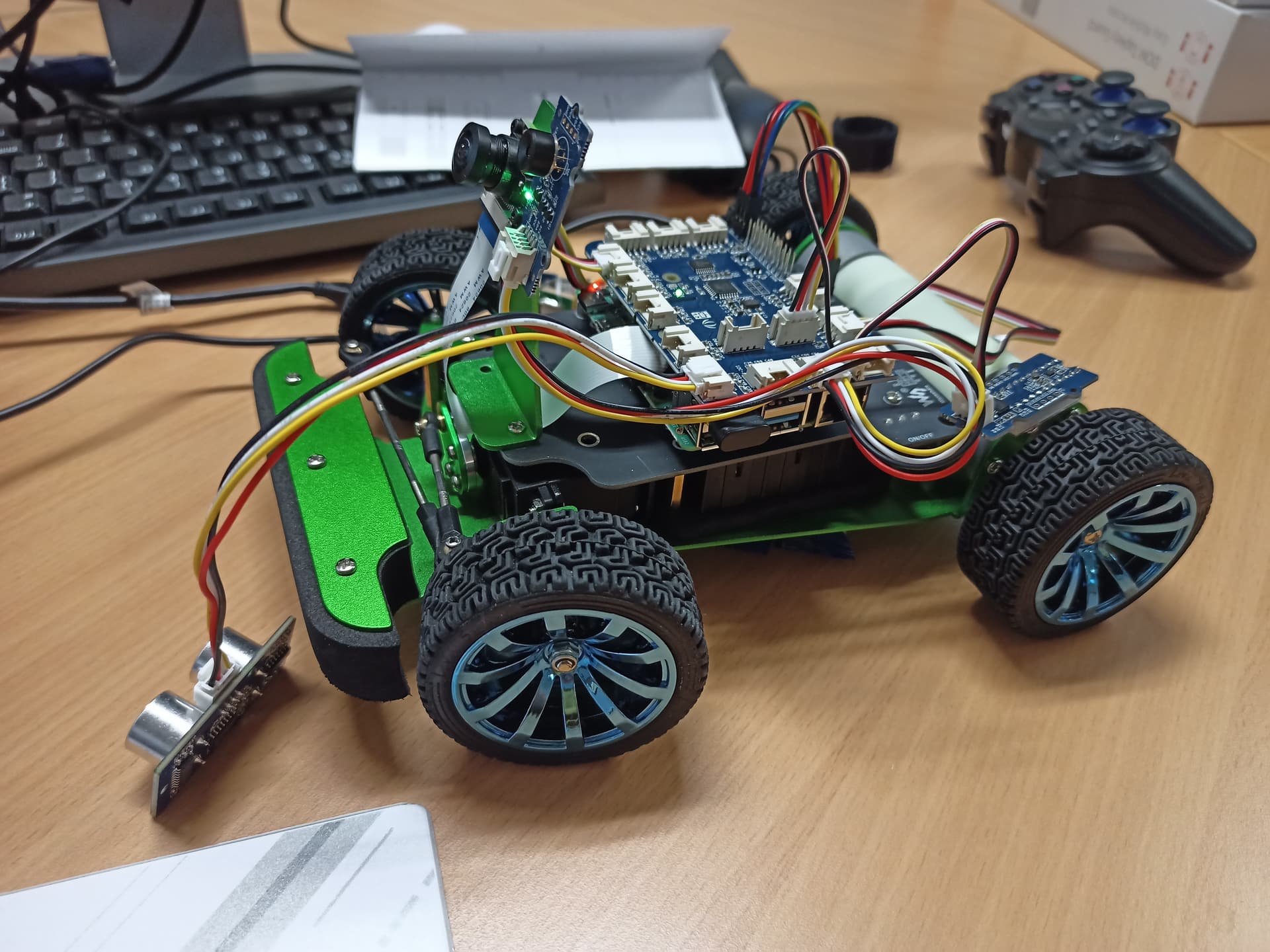
- These two pictures:
- The link above
You now know everything I know about the GrovePi. 
I’m looking forward to messing with it, but there’s a bit on my plate just now.
 .
.