If you’re like me and are constantly trying to get the micro SD card out of the 'bot, this is a godsend!
Seven bucks! I want one!
They come in various lengths, though I would recommend the shortest length that is usable.
===========
Can I get them here in Russia?
Yep! Two ways.
Order it from some Chinese place. They guarantee your money back if you don’t receive it in three months! (Yes, I am so very relieved.)
Build your own.
No, I’m not kidding. Apparently some enterprising Russians have resorted to building their own instead of waiting for three months, but it’s a bit dicy.
I know this is an old post but thanks for sharing. I am going to be trying a mix of things (Dexter OS, GoPiGo OS, Raspian for Robots, ROS) and this will make it easy to switch out different uSD cards. Great find!
Update:
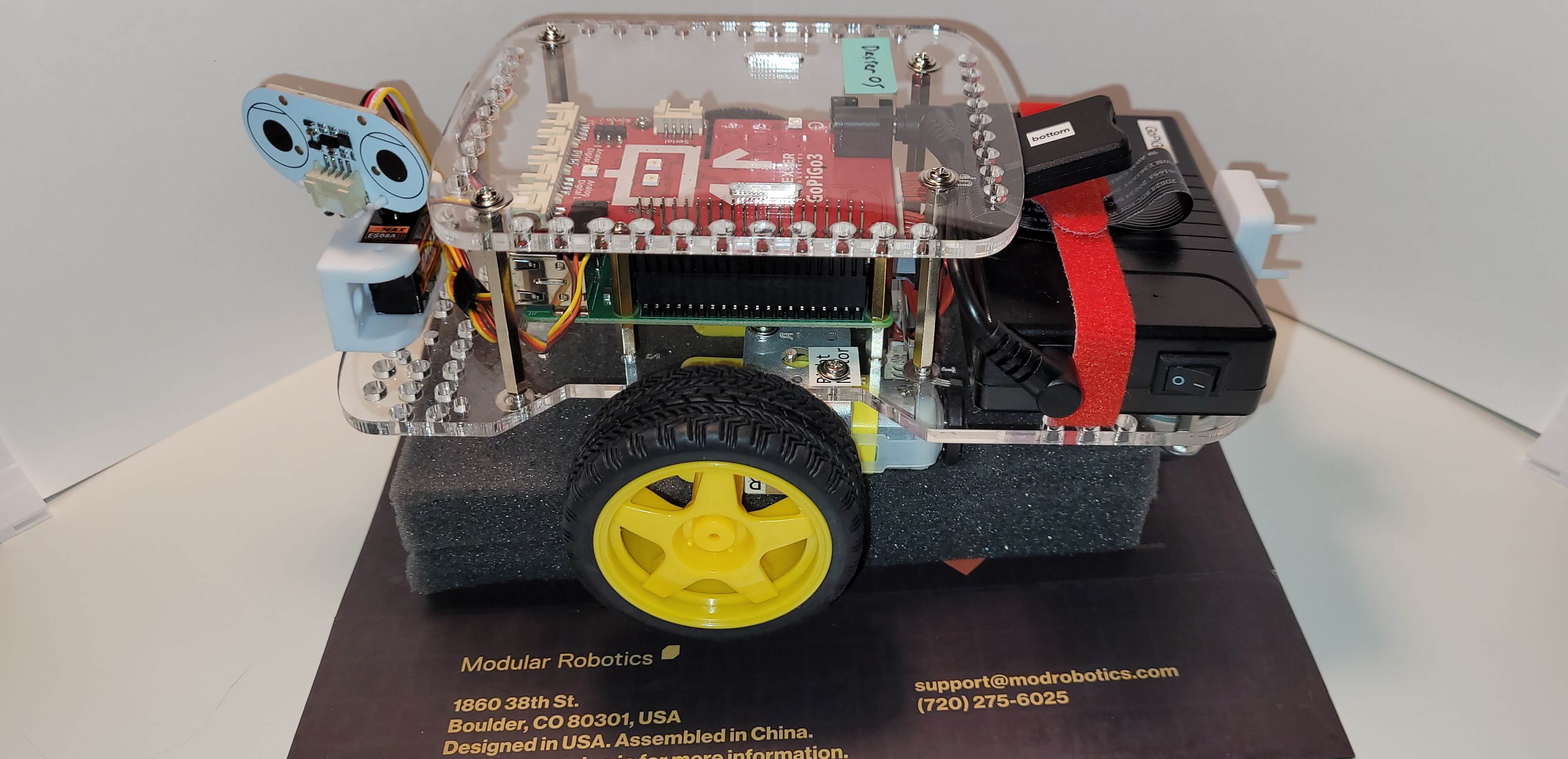
Here is a picture for how I hooked up this extension cable:
Note that I cut down one of the foam blocks that the GoPiGo3 shipped with to support the robot without the wheels touching (so it doesn’t do a lemming off my desk!) and I also placed that support on the cardboard wrapping for the robot kit so I can pivot the robot (cause the foam block is kinda grippy!). Finally, I used one of the mounts (happens to be a white Camera / Distance Sensor) to keep the battery pack from flying off the back of the robot!
@este a couple things you may be interested in:
The GoPiGo encoders and motor commands will be more accurate if your center of gravity is closer to the main wheels than the idler ball, by putting the battery on the top plate.
You mentioned ROS. I built a ROS 2 Humble Hawksbill / Ubuntu 22.04 GoPiGo SDCard image and ROS 2 “first steps”.
See:
@cyclicalobsessive thanks for that insight! As long as the robot is only dead reckoning that’s certainly important. However the real plan is to have autonomous behavior (why I like Carl!). Still, do you have any data how far “off” travel and rotation is with the battery in the back near the caster wheel? Presumably the error is due to tire slippage, yes?
If you are going to be messing with multiple operating systems, you might be interested in some research I did a year or so ago:
Arranging things on a USB SSD so that it can boot into an operating system of your choice.
A hardware hook-up where a multiple-position DIP switch can be used to select the version, and bitness, of the OS you want to use.
I was having a lot of success and I documented it rather thoroughly on the forums here.
Right now, things are put away so I can’t send pictures, but when I get Charlie back out, I can help.
There are a few “gotchas” there, particularly with the organization of the partitions and a specialized config file to read the DIP switches, but once you get the hang of it, it’s relatively easy
I didn’t keep the data from those early tests six years ago. I was so excited to have my new GoPiGo3, I was racing to find optimal configuration and optimal settings so I could get to creating a software architecture for my robot. My prior robot had a multi-process-subsumption architecture in C, while the GoPiGo3 was my first Python based robot, and the first GoPiGo3 drivers from Dexter were single process function based. Soon they completely refactored the GoPiGo3 software into Python classes, and added a weak multi-process safe mutex around the i2c but the GoPiGo3 class was not multi-process safe.
So I didn’t really start doing formal testing of robot in those days. You should try some turns with the battery in both configurations to see if the difference will matter to you.
 micro SD card out of the 'bot, this is a godsend!
micro SD card out of the 'bot, this is a godsend!