Well, I’d like to come back to the “line following mat” creation issue once again.
As mentioned previous, I need to make 10 mats for 10 “program in a box” kits I’m building for troop leaders.
I had created an initial mat (used for a Girl Scout event) using a roll of contact paper and electrical tape 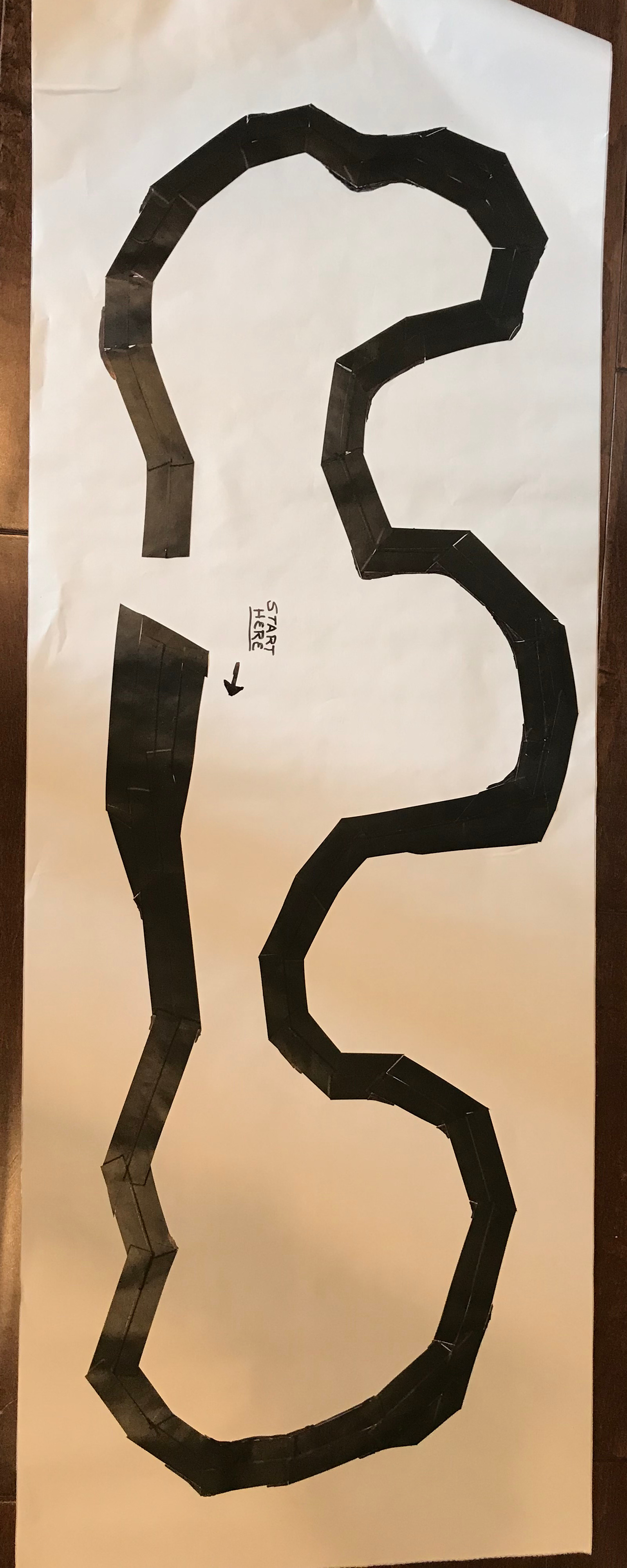 . That worked just fine, however, it is too labor intensive (lots of cuts of the tape to make corners) to consider using this method to create 10 mats. BTW I did try stretching the tape to make corners, but that just bunched up the contact paper, so I reverted to “lots of cuts”.
. That worked just fine, however, it is too labor intensive (lots of cuts of the tape to make corners) to consider using this method to create 10 mats. BTW I did try stretching the tape to make corners, but that just bunched up the contact paper, so I reverted to “lots of cuts”.
My plan for creating 10 mats was to create a design using Powerpoint and have it printed on a 24" x 36" vinyl mat from VistaPrint ($10/per). Today I printed my design on regular paper (FedEx large format printer) as a test, and was surprised that the Gigglebot didn’t recognize the line at all. Specifically, if utilize this micropython code fragment:
right, left = read_sensor(LINE_SENSOR, BOTH)
display.scroll(left)
display.scroll(right)
… when placed over black electrical tape, I will get a reading of 0 from both line sensors. When placed over a printed line I get readings of 300 - 400 (seems to be a lot of variance between the two sensors), but the readings are high enough that there doesn’t seem to be much differential in sensor readings from white paper.
I then tried printing one of the Dexter template pages using my home inkjet and had the same experience as the FedEx 24" x 36" printed example.
I would ideally like to use Microsoft Makecode to use with the line following mats, and I don’t believe you can tweak the threshold using Makecode (there is just a line following block). Makecode does work fine with the black electrical tape just FYI.
Not sure how to proceed, just hoping to get some feedback at this point!
Thank you in advance,
Brad Hontz
Volunteer,
STEM program development
Girl Scouts of Orange County