Hi Robert,
My friend wdjong has been helping me with troubleshooting on my project
So I am responding to your request for information regarding the above issue
I’ve updated the firmware on my GrovePi board since I’m using multiple boards to I2C address 03
I’ve been using the grovepi3 for addressing the ports on this board as per the DexterInd site
https://www.dexterindustries.com/GrovePi/programming/using-multiple-grovepis-together/
However, the analog ports A0//1/2 are giving me errors.
The digital and I2C ports seem to be fine.
As instructed I’ve run the troubleshooting complete_test.sh & generated the attached log.txt fyi
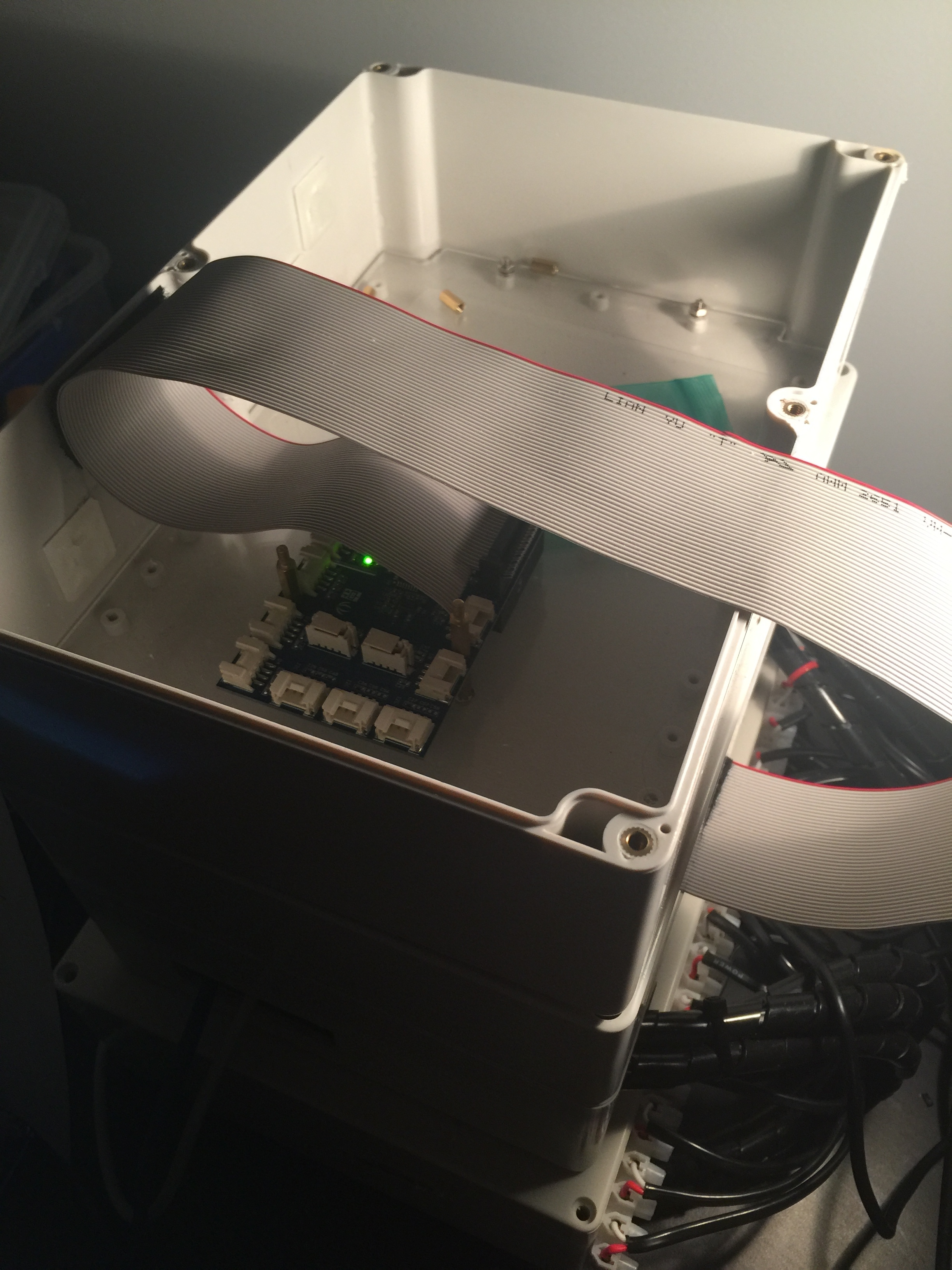
I’ve also attached an image of my setup.
I have four ModMyPi relay boards connected directly to my RaspberryPi board and then connect my Grove boards via a ribbon cable
Check space left
================
Filesystem Size Used Avail Use% Mounted on
/dev/root 28G 4.6G 22G 18% /
devtmpfs 458M 0 458M 0% /dev
tmpfs 462M 0 462M 0% /dev/shm
tmpfs 462M 6.4M 456M 2% /run
tmpfs 5.0M 4.0K 5.0M 1% /run/lock
tmpfs 462M 0 462M 0% /sys/fs/cgroup
/dev/mmcblk0p6 65M 21M 45M 33% /boot
tmpfs 93M 0 93M 0% /run/user/1000
/dev/mmcblk0p5 30M 449K 28M 2% /media/pi/SETTINGS
Check for dependencies
======================
python 2.7.9-1 install ok installed
python-pip 1.5.6-5 install ok installed
git 1:2.1.4-2.1+deb8u3 install ok installed
libi2c-dev 3.1.1+svn-2 install ok installed
python-serial 2.6-1.1 install ok installed
python-rpi.gpio 0.6.3~jessie-1 install ok installed
i2c-tools 3.1.1+svn-2 install ok installed
python-smbus 3.1.1+svn-2 install ok installed
arduino 2:1.0.5+dfsg2-4 install ok installed
minicom 2.7-1+deb8u1 install ok installed
scratch 1.4.0.6~dfsg1-5 install ok installed
wiringPi Found
wiringPi Found
I2C still in blacklist (ERR)
SPI still in blacklist (ERR)
Check for addition in /modules
==============================
I2C-dev already there
i2c-bcm2708 already there
spi-dev already there
Hardware revision
=================
gpio version: 2.36
Copyright (c) 2012-2015 Gordon Henderson
This is free software with ABSOLUTELY NO WARRANTY.
For details type: gpio -warranty
Raspberry Pi Details:
Type: Pi 3, Revision: 02, Memory: 1024MB, Maker: Sony
* Device tree is enabled.
*--> Raspberry Pi 3 Model B Rev 1.2
* This Raspberry Pi supports user-level GPIO access.
Check the /dev folder
=====================
i2c-1
ttyAMA0
USB device status
=================
Bus 001 Device 007: ID 0eef:0001 D-WAV Scientific Co., Ltd eGalax TouchScreen
Bus 001 Device 006: ID 045e:00cb Microsoft Corp. Basic Optical Mouse v2.0
Bus 001 Device 005: ID 1c4f:0002 SiGma Micro Keyboard TRACER Gamma Ivory
Bus 001 Device 004: ID 05e3:0608 Genesys Logic, Inc. USB-2.0 4-Port HUB
Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast Ethernet Adapter
Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=dwc_otg/1p, 480M
|__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/5p, 480M
|__ Port 1: Dev 3, If 0, Class=Vendor Specific Class, Driver=smsc95xx, 480M
|__ Port 2: Dev 4, If 0, Class=Hub, Driver=hub/4p, 480M
|__ Port 3: Dev 6, If 0, Class=Human Interface Device, Driver=usbhid, 1.5M
|__ Port 4: Dev 7, If 0, Class=Vendor Specific Class, Driver=usbtouchscreen, 1.5M
|__ Port 2: Dev 5, If 0, Class=Human Interface Device, Driver=usbhid, 1.5M
|__ Port 2: Dev 5, If 1, Class=Human Interface Device, Driver=usbhid, 1.5M
Raspbian for Robots Version
===========================
cat: /home/pi/di_update/Raspbian_For_Robots/Version: No such file or directory
Hostname
========
raspberrypi
Checking for Atmega chip
========================
avrdude: Version 5.10, compiled on Jun 18 2012 at 12:38:29
Copyright (c) 2000-2005 Brian Dean, http://www.bdmicro.com/
Copyright (c) 2007-2009 Joerg Wunsch
System wide configuration file is "/etc/avrdude.conf"
User configuration file is "/root/.avrduderc"
User configuration file does not exist or is not a regular file, skipping
Using Port : unknown
Using Programmer : gpio
AVR Part : ATMEGA328P
Chip Erase delay : 9000 us
PAGEL : PD7
BS2 : PC2
RESET disposition : dedicated
RETRY pulse : SCK
serial program mode : yes
parallel program mode : yes
Timeout : 200
StabDelay : 100
CmdexeDelay : 25
SyncLoops : 32
ByteDelay : 0
PollIndex : 3
PollValue : 0x53
Memory Detail :
Block Poll Page Polled
Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack
----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- ---------
eeprom 65 5 4 0 no 1024 4 0 3600 3600 0xff 0xff
flash 65 6 128 0 yes 32768 128 256 4500 4500 0xff 0xff
lfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
hfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
efuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
lock 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00
signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00
Programmer Type : GPIO
Description : Use sysfs interface to bitbang GPIO lines
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x000100
avrdude: Expected signature for ATMEGA328P is 1E 95 0F
Double check chip, or use -F to override this check.
avrdude done. Thank you.
Checking I2C bus for devices
============================
Checking I2C bus 0
==================
Error: Could not open file `/dev/i2c-0' or `/dev/i2c/0': No such file or directory
Checking I2C bus 1
==================
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: 03 -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
Checking for firmware version
=============================
Traceback (most recent call last):
File "/home/pi/Desktop/GrovePi/Software/Python/grove_firmware_version_check.py", line 40, in <module>
print("GrovePi has firmware version: %s" %grovepi.version())
File "/home/pi/Desktop/GrovePi/Software/Python/grovepi.py", line 265, in version
return "%s.%s.%s" % (number[1], number[2], number[3])
TypeError: 'int' object has no attribute '__getitem__'