In my quest to learn ROS2 with the “Hands On ROS for Robotics Programming” book, the Gazebo simulation environment did not function on my “ROS Desktop”.
(I also came to understand “Gazebo is totally separate and supports ROS.”)
My ROS Desktop is
- Ubuntu 20.04.2 Desktop in a
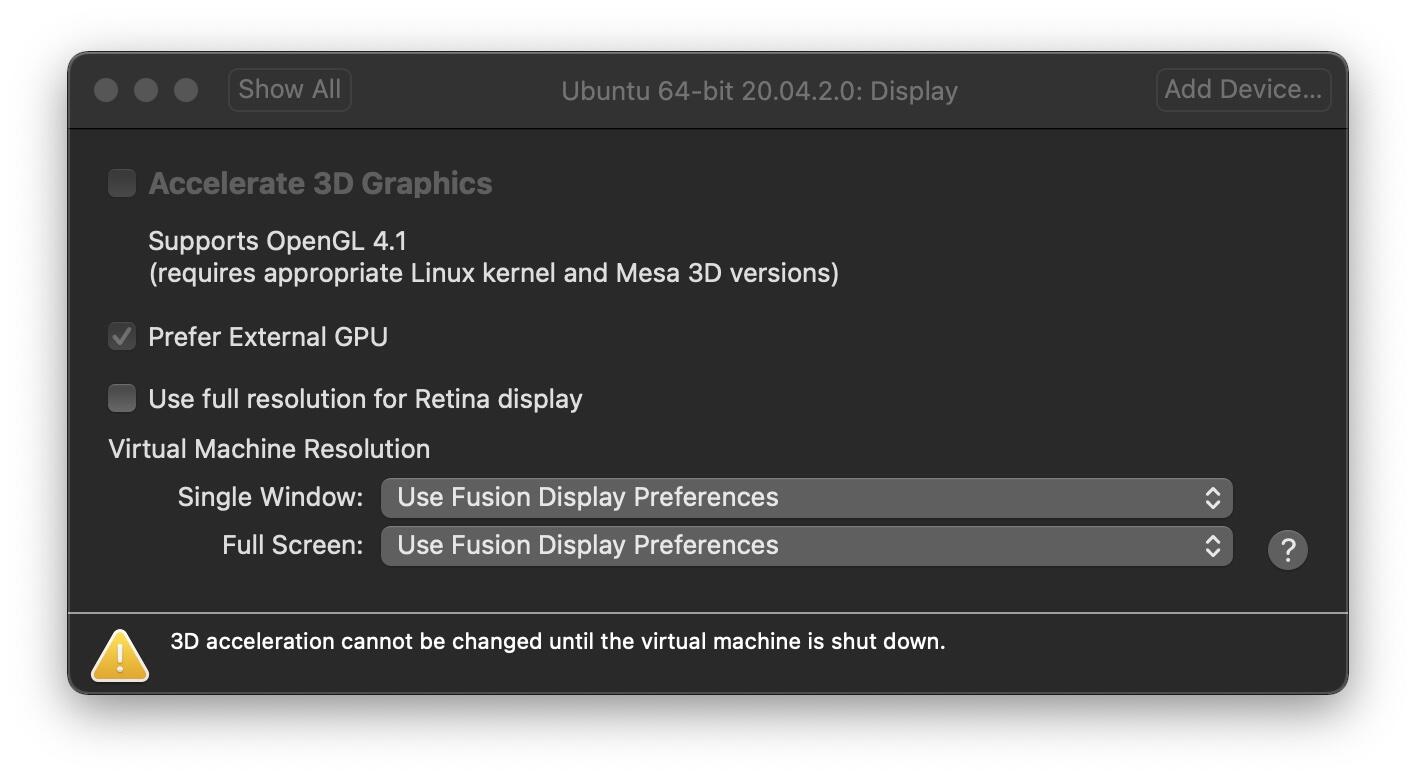
- VMware Fusion virtual machine
- MacOS on 2018 MacMini AND a Radeon 580 external GPU
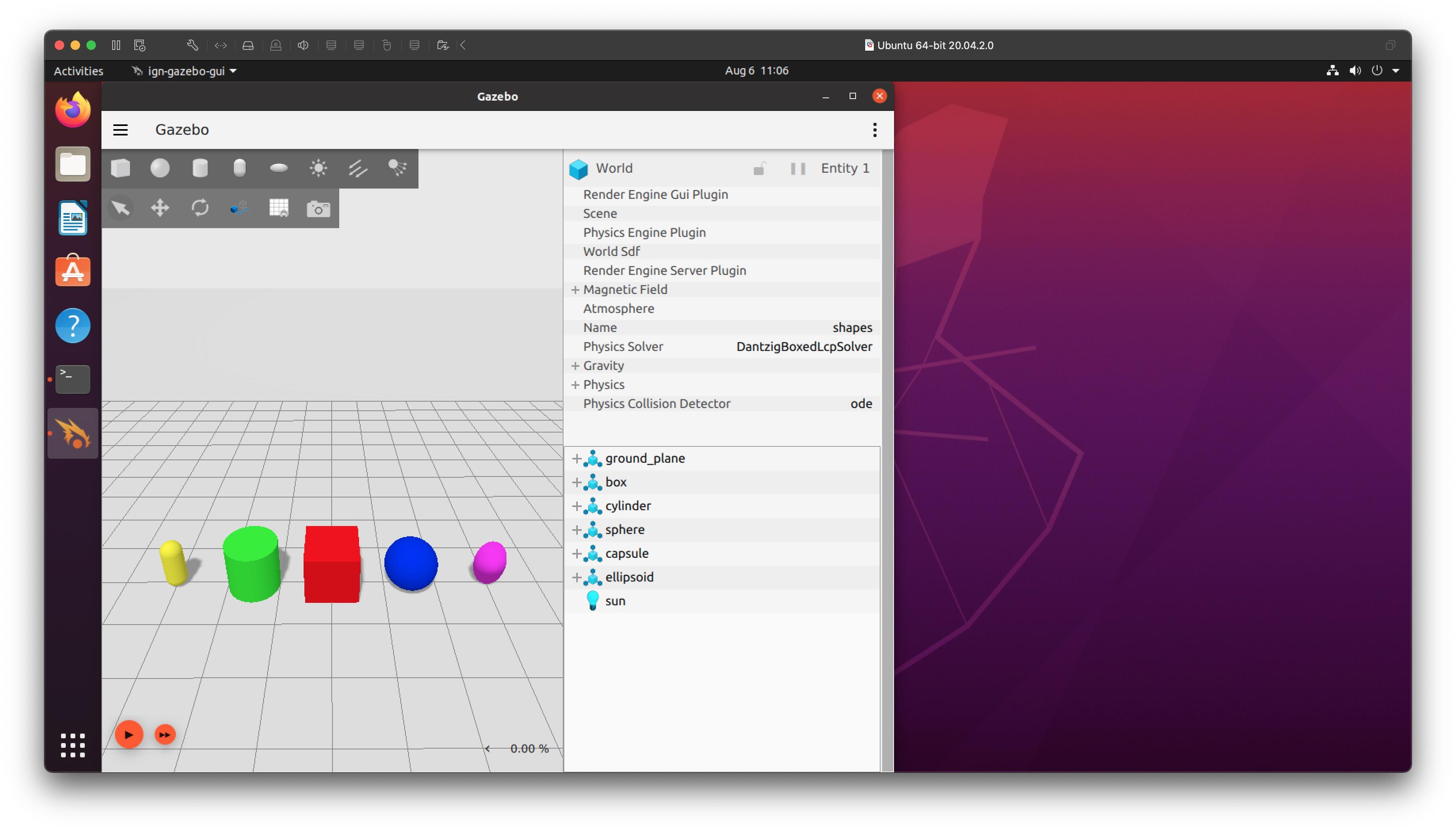
Gazebo comes in two flavors now, “Gazebo Classic” and “Ignition Gazebo”, and the new version Ignition seemed to almost work on my ROS Desktop.
Further investigation led me to turn off OpenGL support in the virtual machine, and voila! I have the “Ignition Gazebo” ROS/ROS2 simulation environment running now: