Continuing the discussion from Impressive Smartphone micro-ROS based “Thing”:
Given the following screenshot from that clip:
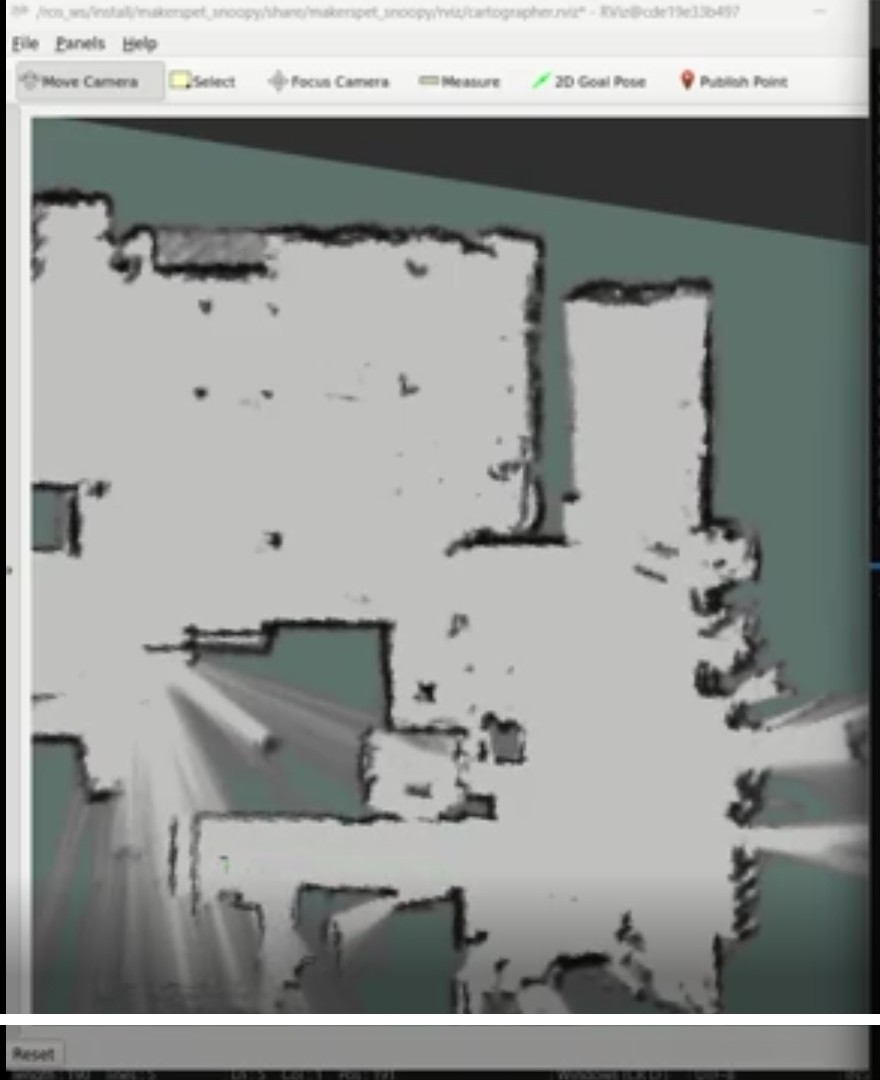
Am I correct in assuming that the “ray-like” areas that look like flashlight beams represent possibly open areas that have yet to be explored, (and given a defined shape?)
====================
- The title must be at least 15 characters.
So much for succinct titles. . .