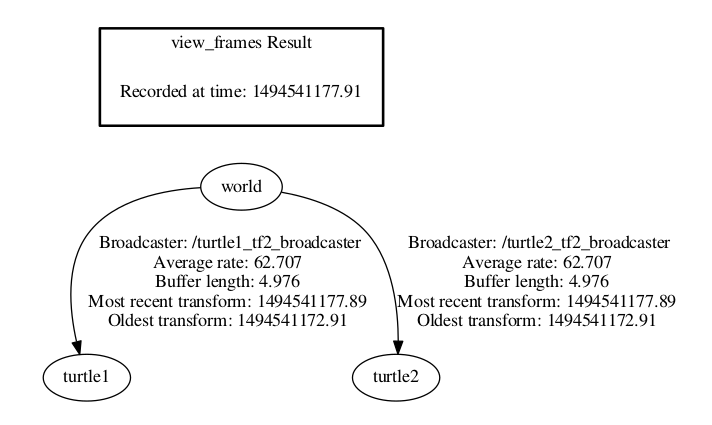
* View tf2 frames
Dave: ./runit.sh
Desk: ros2 run tf_tools view_frames.py
Listening to tf data during 5 seconds...
Generating graph in frames.pdf file...
Desk: evince frames.pdf (or browse to folder and dbl-click frames.pdf)
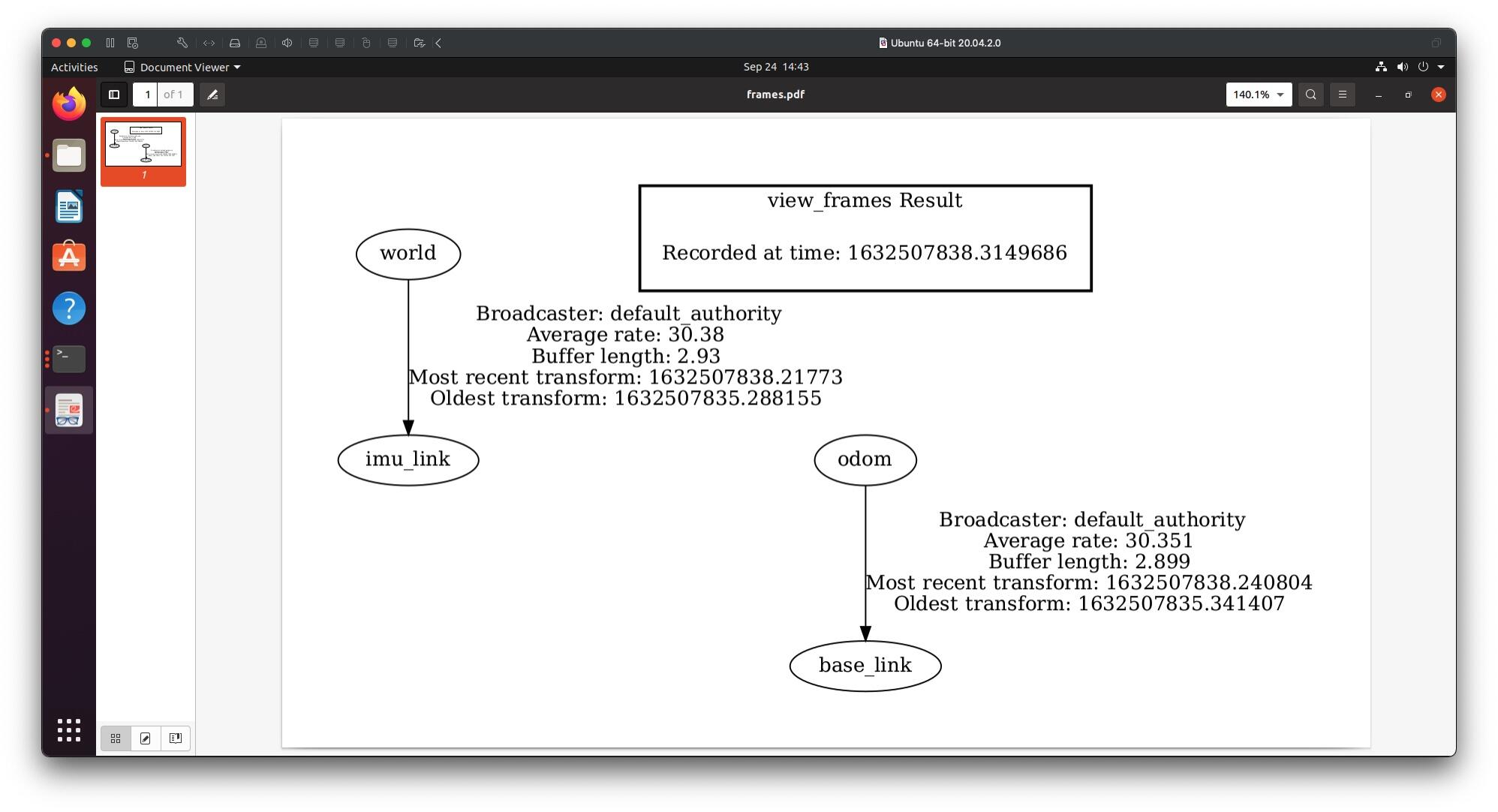
This is the issue I was having. In my case the tf from imu_link to world was being published by the imu driver. That overrode the tf coming from the URDF between the imu_link and base_link. When I was using AMCL did did have a transform from map to odom - I think that comes from the localization package.
I was going to try removing the tf published by the imu driver to see what happened. I never got to that because the imu node kept crashing. If your new driver keeps it from crashing, I’ll try removing the tf publisher next.