I am making progress to understand more about ROSbot GoPi5Go-Dave and the ROS 2 Humble Navigation. Dave got confused early in his expedition to the kitchen today, but recovered and continued on to success getting to the kitchen. His return from the kitchen was uneventful - successful journey of 6 minutes duration.
Dave draws about 10W when travelling (with LIDAR and Navigation added to the eight normal nodes 8W that make up “ROSbot GoPi5Go-Dave”)
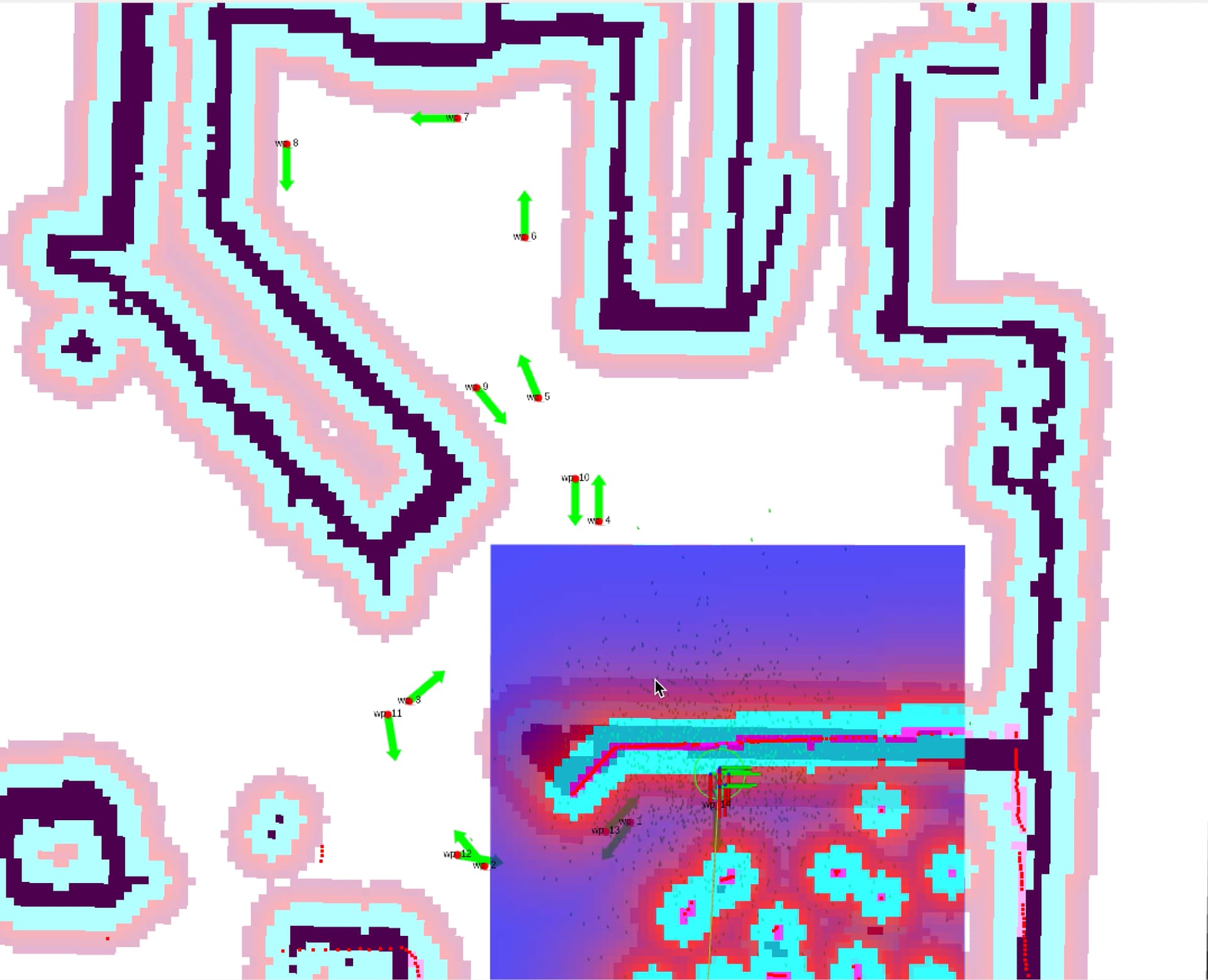
The Plan
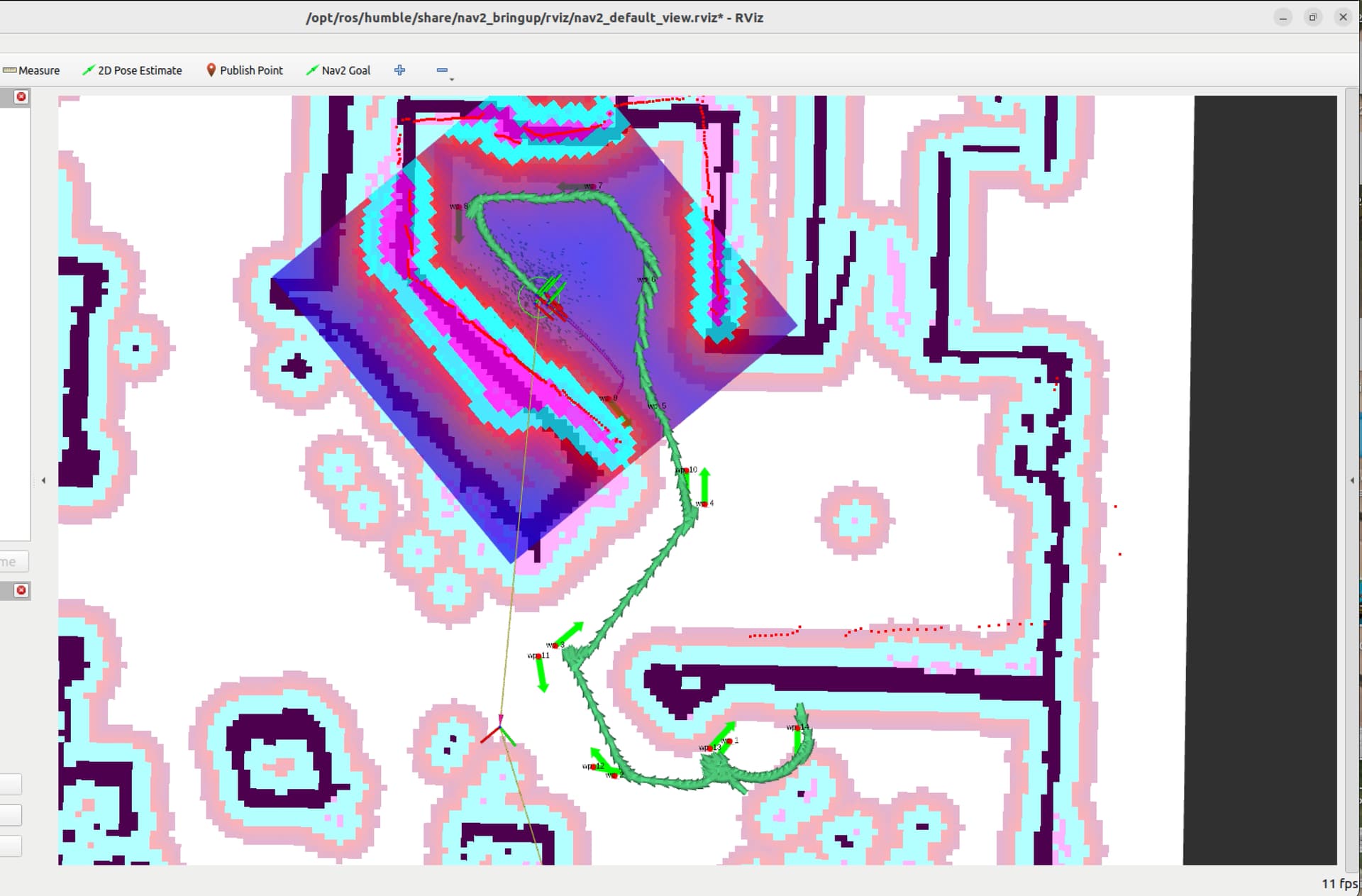
Kitchen Success After Confusion Recovery
Home Again - Close Enough For This Test
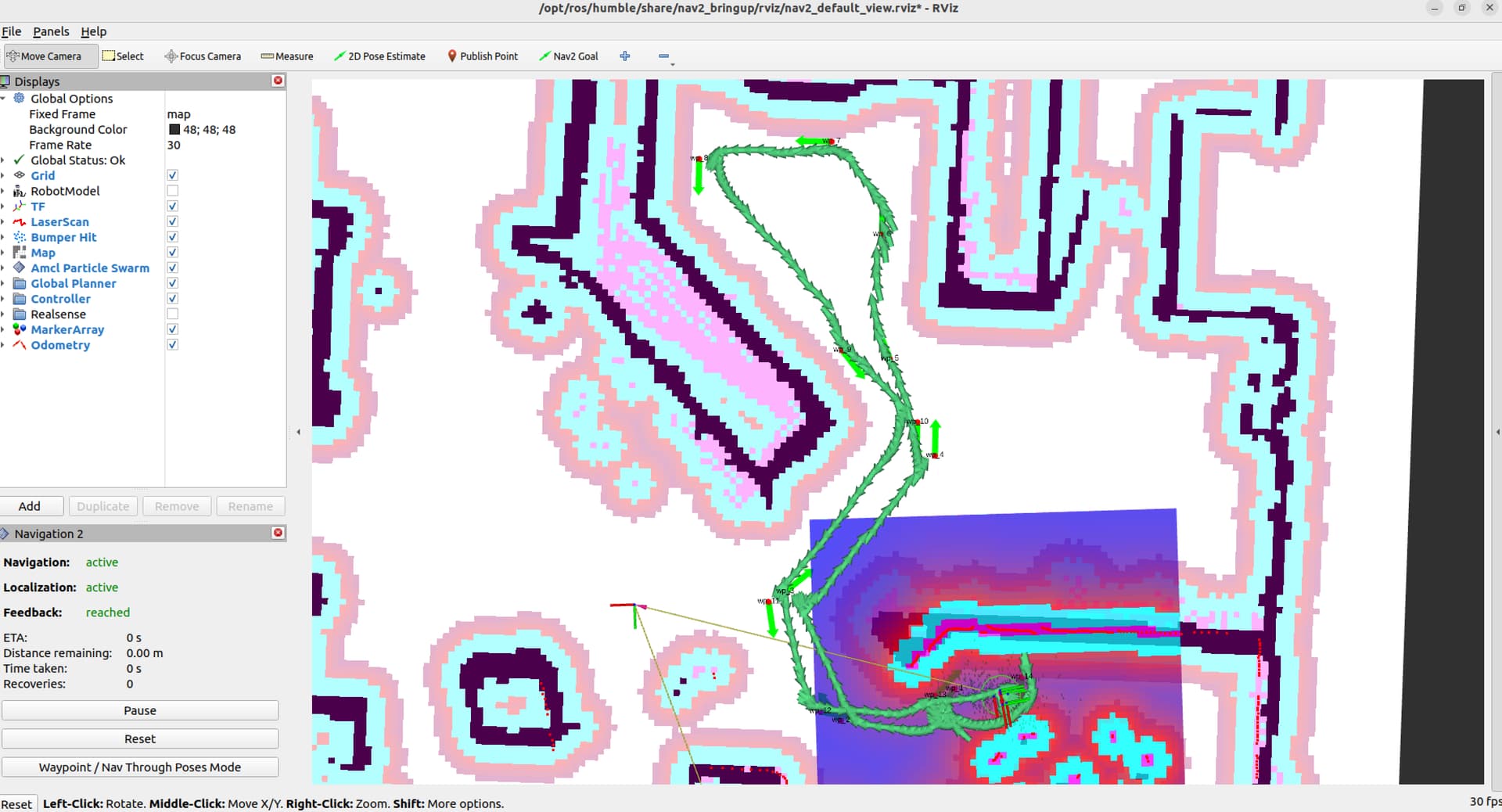
Result - Dave is about 100cm short and 5-10 degrees off the plan
(Navigation has wide default tolerances)

I believe the confusion was a result of Dave’s current “drives right when commanded straight” flopsy wheel syndrome. New wheels on their way to Dave.