Hello @rexmagoo
My apologies, I was out for a few days with a health issue.
I have to investigate this but I do have an inkling as to what the problem could be.
Btw, I seem to remember you asked if GoBox could be done with Bloxter. As of DexterOS 1.1, yes, they can.
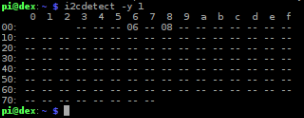
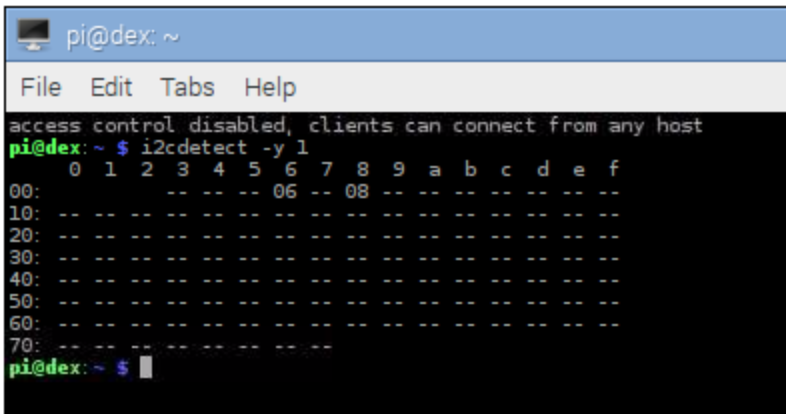
And, yes, we did run the line calibration which is how we discovered the problem. Because sensor over black tape = -1,-1,-1,-1,-1 and sensor over white background = -1,-1,-1,-1,-1. We ran it many, many times hoping for something to click, but no matter what we did we got the same result. Which, I understand might be the definition of insanity
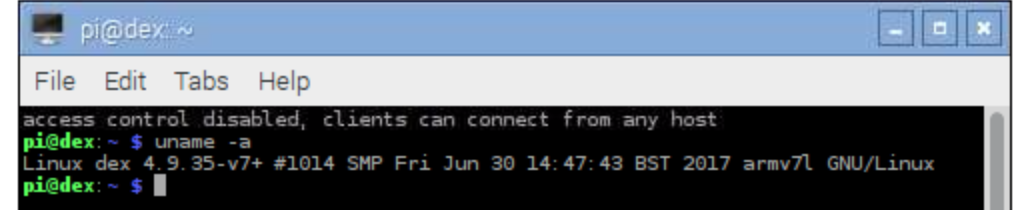
Here’s what we get (see attached). I waited for about 5 minutes for the “Time:” information to appear but nothing else happens. Hopefully, this will help you pinpoint where it’s all going wrong for us.
Sorry it took me so long to respond, it was my turn for a busy week. So, I’ll follow the instructions in the @RobtertLucian post to downgrade and let you know if that work for us.
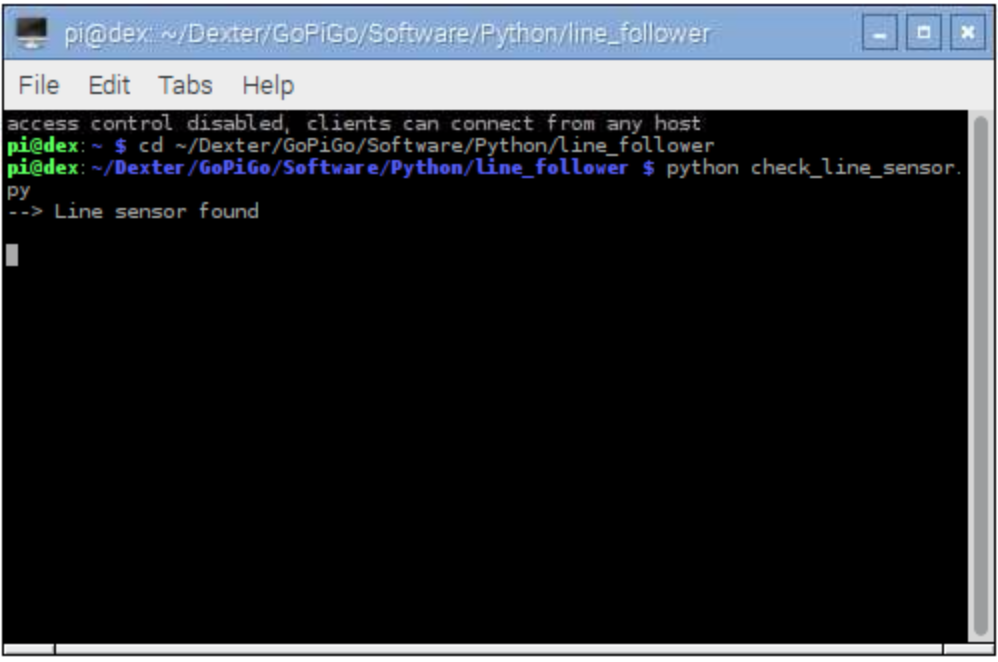
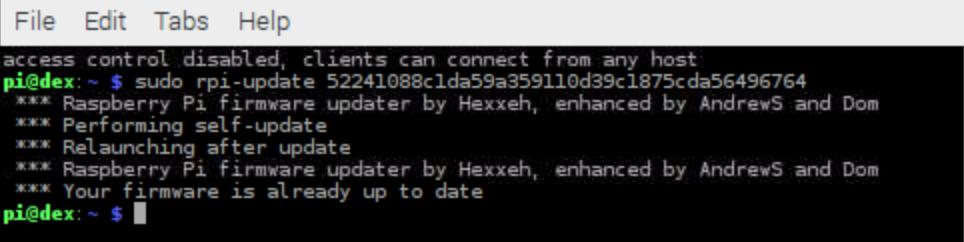
We know for sure that the Line Follower Sensor doesn’t work on 4.9.35-v7+ as the Foundation has changed how the protocol works, but I’m surprised the rpi-update command isn’t doing its job - we even had checked the hash value we’ve given you in the rpi-update command and still points to version 4.4.50-v7+, so we can rule out the human error.
I’m going to test this on my Raspberry Pi and see if rpi-update downgrades the kernel or not.
As a side note, we have a fix on our sleeve and we’re about to roll it out very soon - this will make the Line Follower Sensor work on any version of the kernel.
Just letting you know we’ve got the fix in place for a while already in case you didn’t know. sudo sh -c "curl -kL dexterindustries.com/update_gopigo | bash" will update you to the latest.