A year or more ago I participated in the Oak-D-Lite stereo depth camera kickstarter campaign and received a powerful computer vision sensor for GoPiGo3 ROSbot Dave.
I mounted it to Dave, added a separate power supply for it, and confirmed the demo programs worked, but my ROS knowledge was limited at the time so Dave never made use of the fancy new sensor.
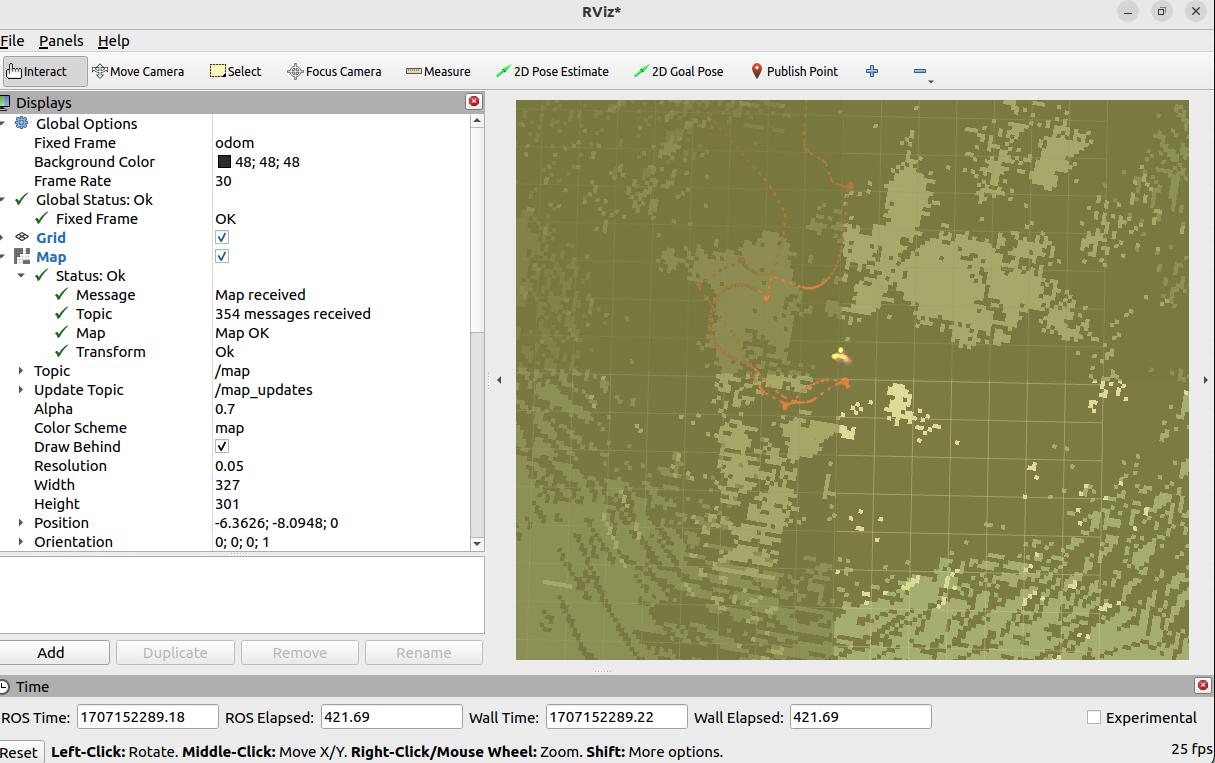
Sorry Dave, Create3-Wali stole your sensor and just got it (sorta) working:
Running RTABmap on WaLI may be too much load on the Create3 - “RTABmap: /odom: over 5 seconds since last odometry topic received”
It may turn out that GoPiGo3 Dave with a “lowly Raspberry Pi 4” is better suited to ROS than the “runs ROS native” Create3 with a “supercomputer” on its back.
I thought enough time had passed for the Create3 (and TB4) to get the bugs out, but if iRobot under-designed the hardware of the Create3, the future of WaLI’s “Intelligence” is in doubt.
Wali was supposed to let me explore the higher layers of ROS with all the GoPiGo3 robot weaknesses solved ( IMU-Wheel_Encoder fusion, bumpers, obstacle detection, stall protection, power supply, wall following AND docking ).
And my eagerness to get the Oak-D-Lite during the kickstarter campaign may have prevented me from investigating pointclouds. The Luxonis ROS pointcloud driver with my “no-IMU” camera is not publishing pointcloud2 messages. (It pubs depth images that RTABmap uses - distances from the stereo cameras, but does not transform the depths into x,y,z of the points) (Also so neat that in addition to stereo depth it runs any neural net object recognition inside the camera, taking all that OpenCV load off the Pi 4/5 processor.)