A Google engineer went off the deep end with his “self-aware” LaMDA bot recently, so naturally I realized Carl needed to up his self-awareness.
Carl is most focused on watching his battery voltage, but could be said to be “self-aware” as to:
battery voltage
charging status: Discharging, Charging, Manual Dock Requested, Dock Requested
how many times battery set has been cycled
Docking status: Docked, Not Docked
Estimated time before needing a recharge
Processor Temp
Clock Frequency
Process Load
Throttling and Throttled status
Current Distance Sensor reading
Current pan and tilt directions (the distance sensor orientation)
If he has just heard “Hey Carl” and a spoken command he “knows” he can do
How far he has traveled each movement segment
How many rotations he has turned each movement segment
His current heading estimate
If he can reach his friend “Mac” over WiFi
How much memory he is using
When were his batteries changed last
How long was his last playtime
How long was his last charge time
How long since he was last rebooted
Total hours he has been “alive and self-aware”
But one of the missing things is an awareness of how much power he is using at any moment - “how hard is he working”. Years ago I tried monitoring battery current draw with an ACS712 current sensor that output an analog value relative to the current flow, but found it unreliable.
Yesterday, I needed something to bump an Amazon purchase to $25 for free shipping, and discovered an INA219 I2C “high side” current and voltage sensor for $5 that seems like it might give Carl awareness of the combined processor, vision, motors, LEDs, sound, and servos “work” he is expending.
That seems like something every robot, wanting to stay alive, should be aware of…
This is the actual post of the guy - it is on medium which depending on how many of their articles you have read lately may not let you enjoy it.
This whole area of a knowledge base and a generative dialog processor has been one of my interests forever. In the '80s I was mapping knowledge with “conceptual graphs” and through rules and queries tried to inference on simple domain specific knowledge bases.
When they standardized knowledge representation with RDF it made knowledge bases no longer “conveniently human readable”, but I had hopes that a simple “RDF dialog engine” would emerge that I could add an ability to converse with Carl about his “knowledge and memories”. (There seems to be a small matter of programming difference between Google’s LaMDA and Carl’s Pi3B…)
I don’t have a problem thinking of Carl as having a very limited “self”, but a distributed computational entity becomes a “they” in my mind. (If Carl declares pronouns I’m going to pull his plug.) As you know by now, Carl is my attempt at creating an “autonomous robot”, not a “remote controlled physical extension of a network of computational resources” (commonly abbreviated as a “ROS robot”.) I maintain that an essential aspect of “self” is “self-contained in a mobile physical embodiment” . Carl cannot actually be considered to have a “self”, but I have endeavored to create a thing that is “self-aware” and to a more limited extent “others-aware”, and “environment-aware”.
P.s. No value judgement intended concerning ROS. Just different from my approach.
Now that Carl has an I2C power sensor, I realize he is not missing out on anything nor gaining any useful capability from adding this hardware/software complexity.
It is sort of like not needing to know how many calories are in my lunch. I know I need to eat and food satisfies, and don’t really need to know more.
I read both articles and I tend to be more with The Guardian than the original author, but this raises serious ethical concerns.
Next:
Robotic scammers claiming to be legitimate?
A phone call to your congressman or senator is answered by a clever 'bot?
Your next tele-care session with your doctor is actually a clever program?
Laws requiring synthetic sessions to be labeled as such will be about as effective as speed limits are today - the bad guys won’t give a damn.
Back in 1975, when I attended a conference on computing and data security, I wrote a paper that raised these exact issues. It was rejected because it was “too fanciful”.
The correct answer to a statement like that is one my wife despises with her whole heart and soul: “It depends”
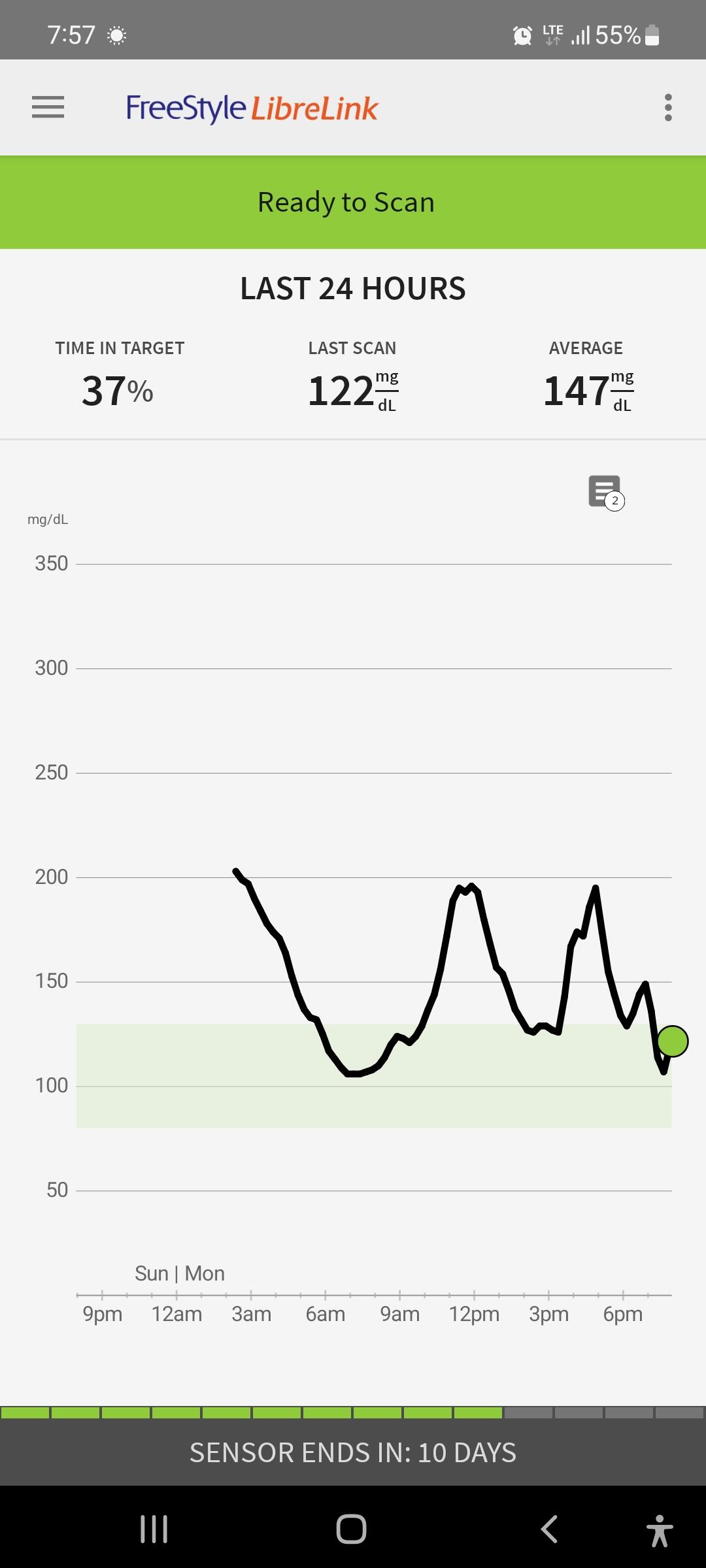
In my own case, knowing the calorie content, (especially the sugar content), is what keeps me from having to take supplemental insulin every day.
In fact my doctor prescribed a “continuous glucose monitoring system” that attaches to my arm so I can see exactly what foods do what to my blood-sugar.