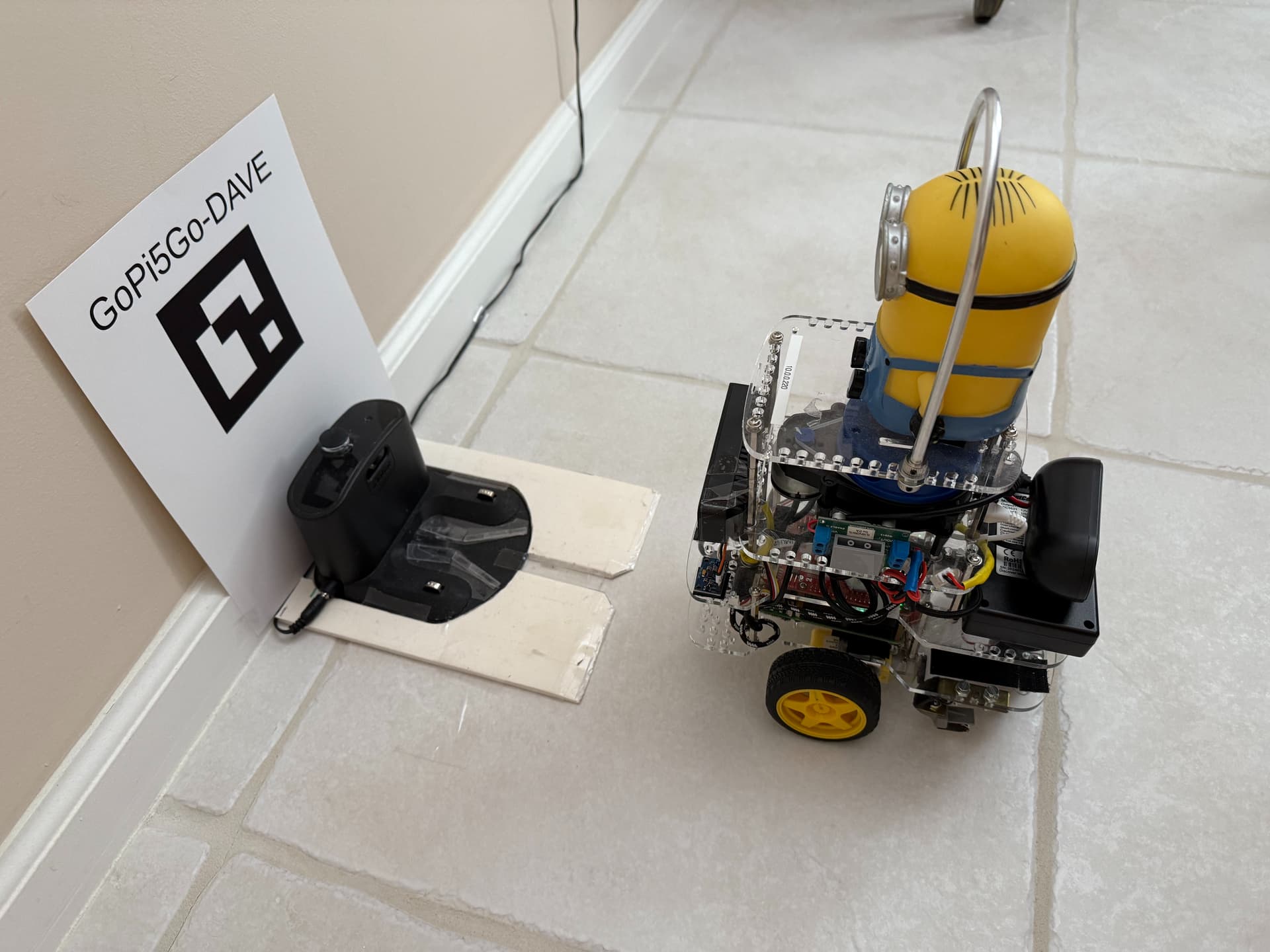
We will see. The only part the GoPiGo3 had in this was to power the camera (battery direct to Pololu buck) and provide 8W to the Raspberry Pi 5 processor.
If the GoPiGo3 can be made to navigate with centimeter and 1-2 degree heading precision under ROS control, Dave will be able to belly up to the juice bar and live another 5 hours at a time. That test phase (and significant development work) is a few months off though.
Right now Dave and I are really high on demonstration of this new capability.
(That Dave is where Carl was three years ago … not sure why I am so impressed.)
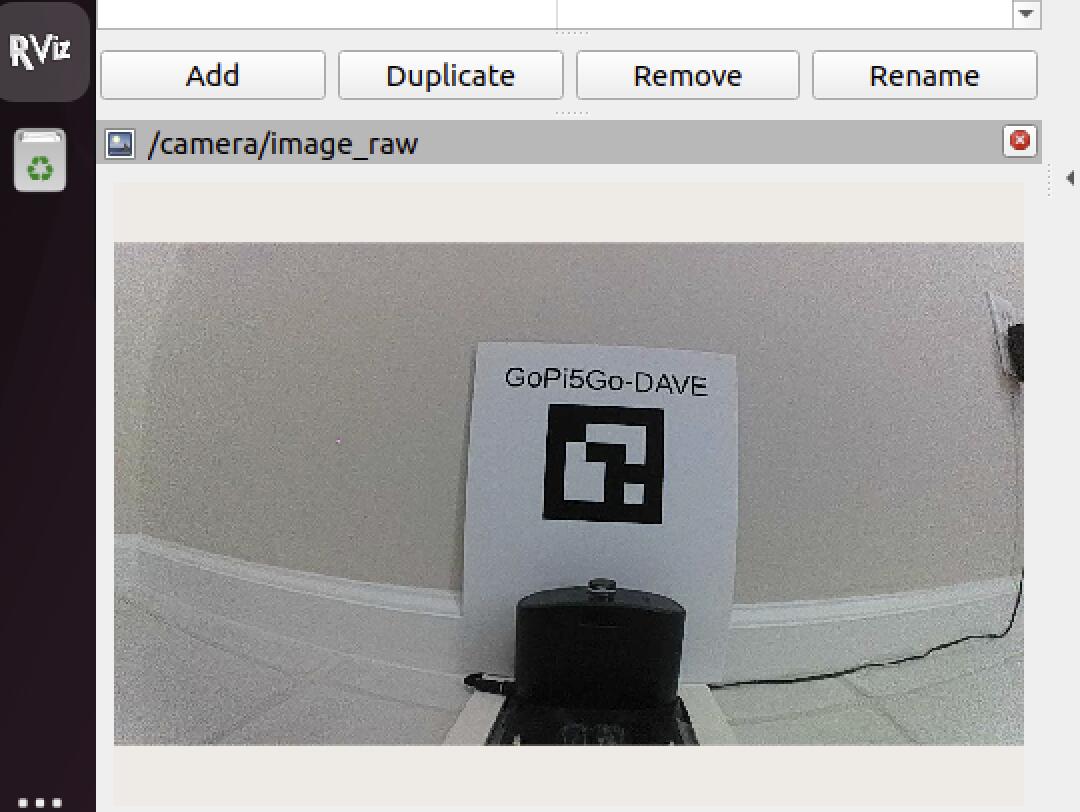
ArUco seems easier for me to use. The ROS community seems to prefer AprilTags
The ArUco ROS code returned a pose in the detection topic, while the AprilTag code returned a position in the image frame in the detection topic and supposedly published a /tf for the marker.
I’m not sure how to echo only a specific transform, so I cannot compare the two markers for pose accuracy
FIRST robotics uses standard 36h11 AprilTags reportedly because they provide more stable pose estimations
The Nav2 “Docking Feature” video shows a robot using AprilTags, but when I asked if I could use ArUco markers Steve Macenski (the god of Nav2), he said Nav2 is not dependant on any marker type.
I also have to figure out how to use the mfg provided camera calibration or generate my own. I remember doing that for Carl’s PiCam, way back when.
(The apriltag ros package is from Christian Rauch’s GitHub. @christian Rauch also published the first ROS for GoPiGo3 package ros-gopigo in 2016.)