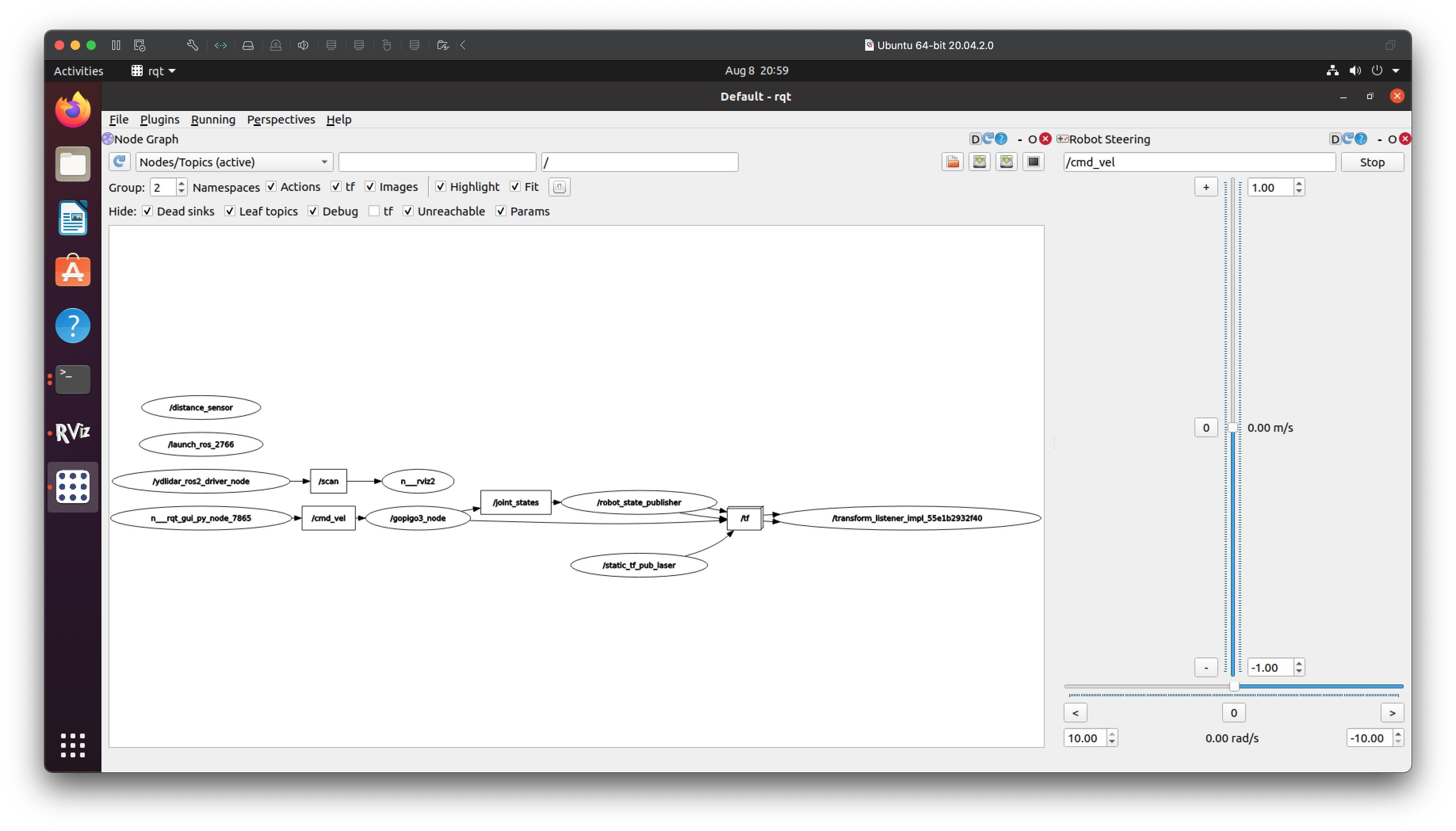
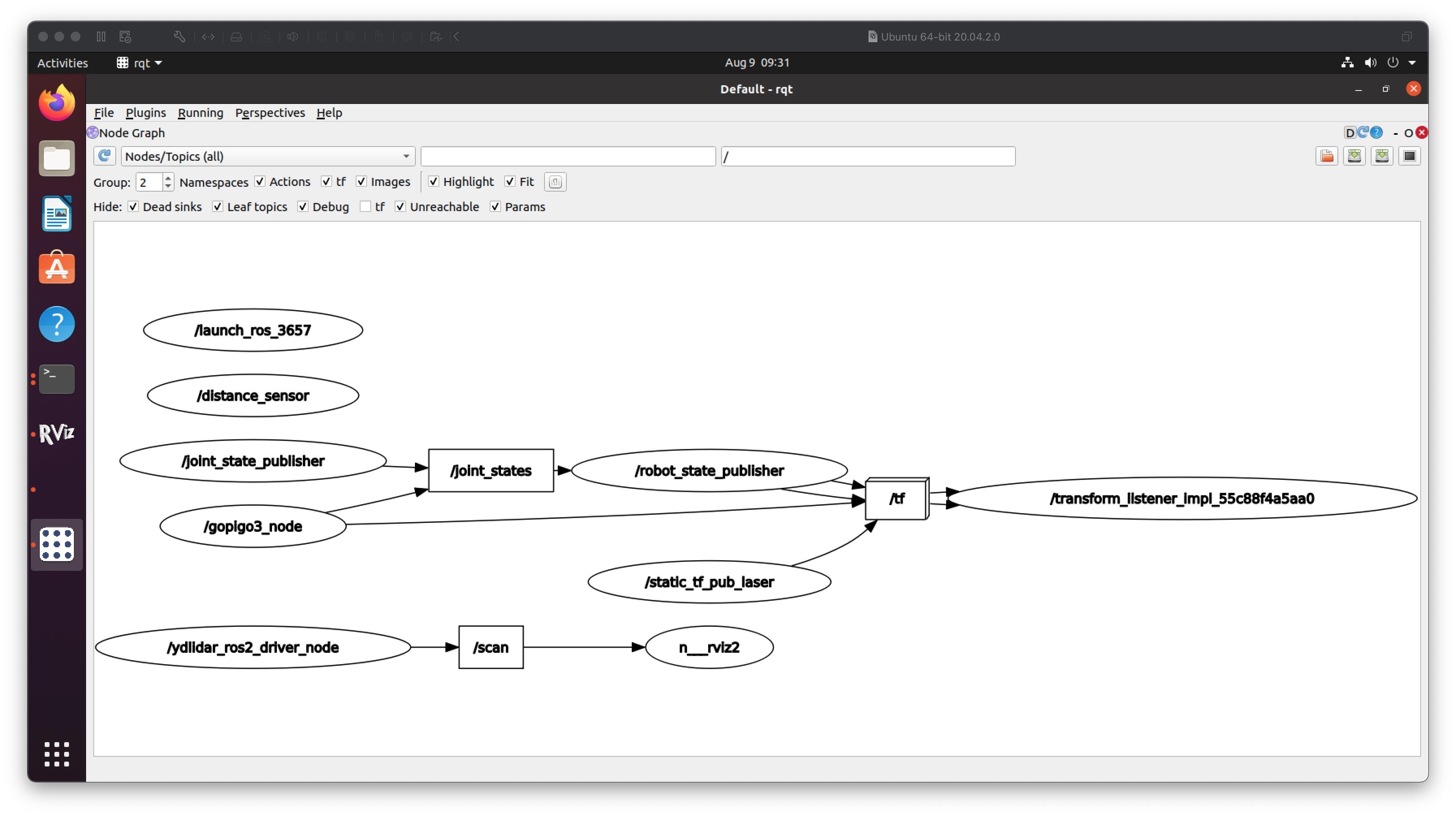
I was working on autonomous navigation in my “roboland” and not having much luck. The global planner would generate a path, but the robot wouldn’t follow it most of the time. Part of the problem seemed to be localization - when sitting still the robot jumped around a lot in RVIZ. But tweaking settings for the global and local planners didn’t seem to help.
I found this useful tutorial on the ROS site:
http://wiki.ros.org/navigation/Tutorials/Navigation%20Tuning%20Guide
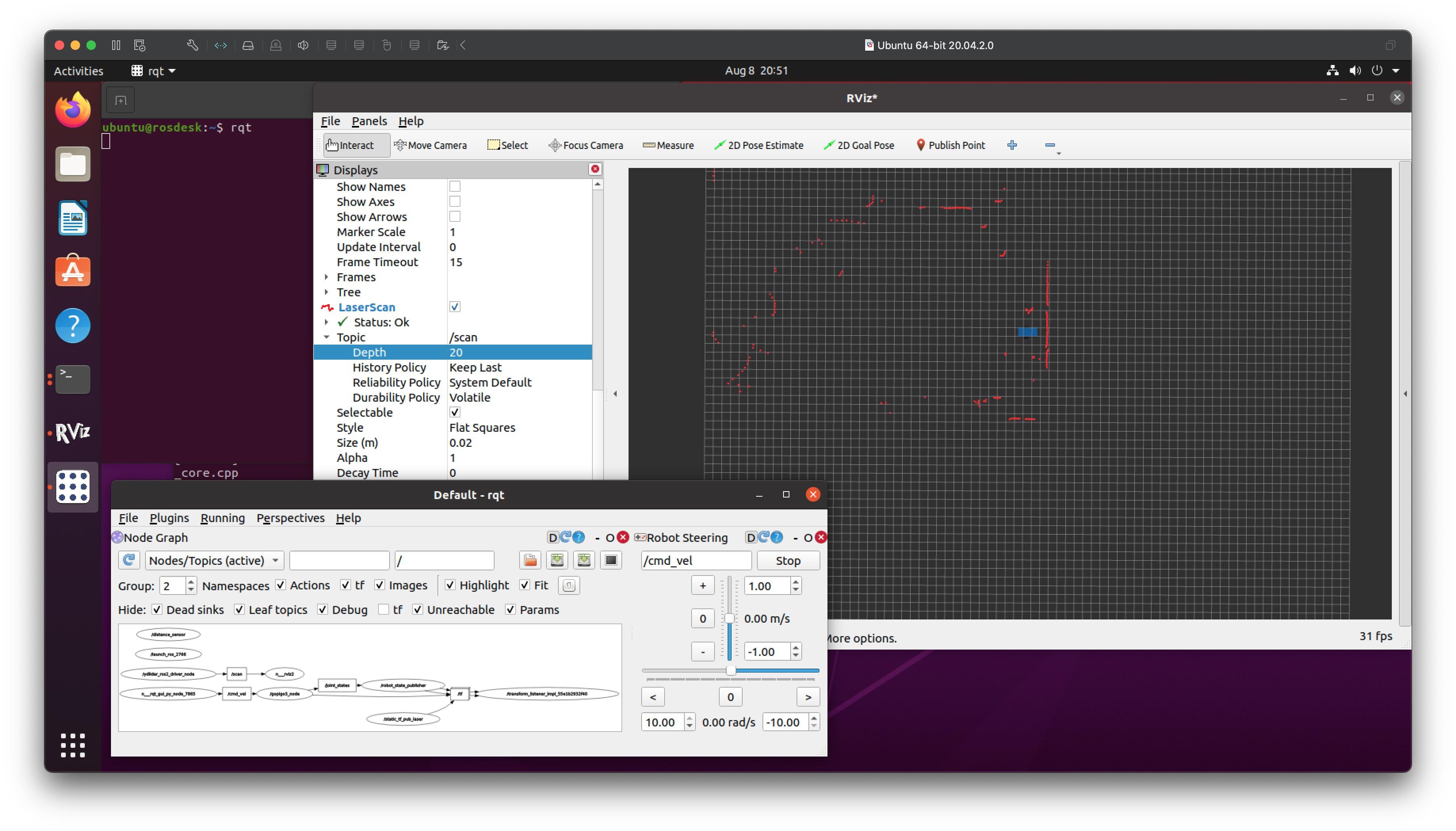
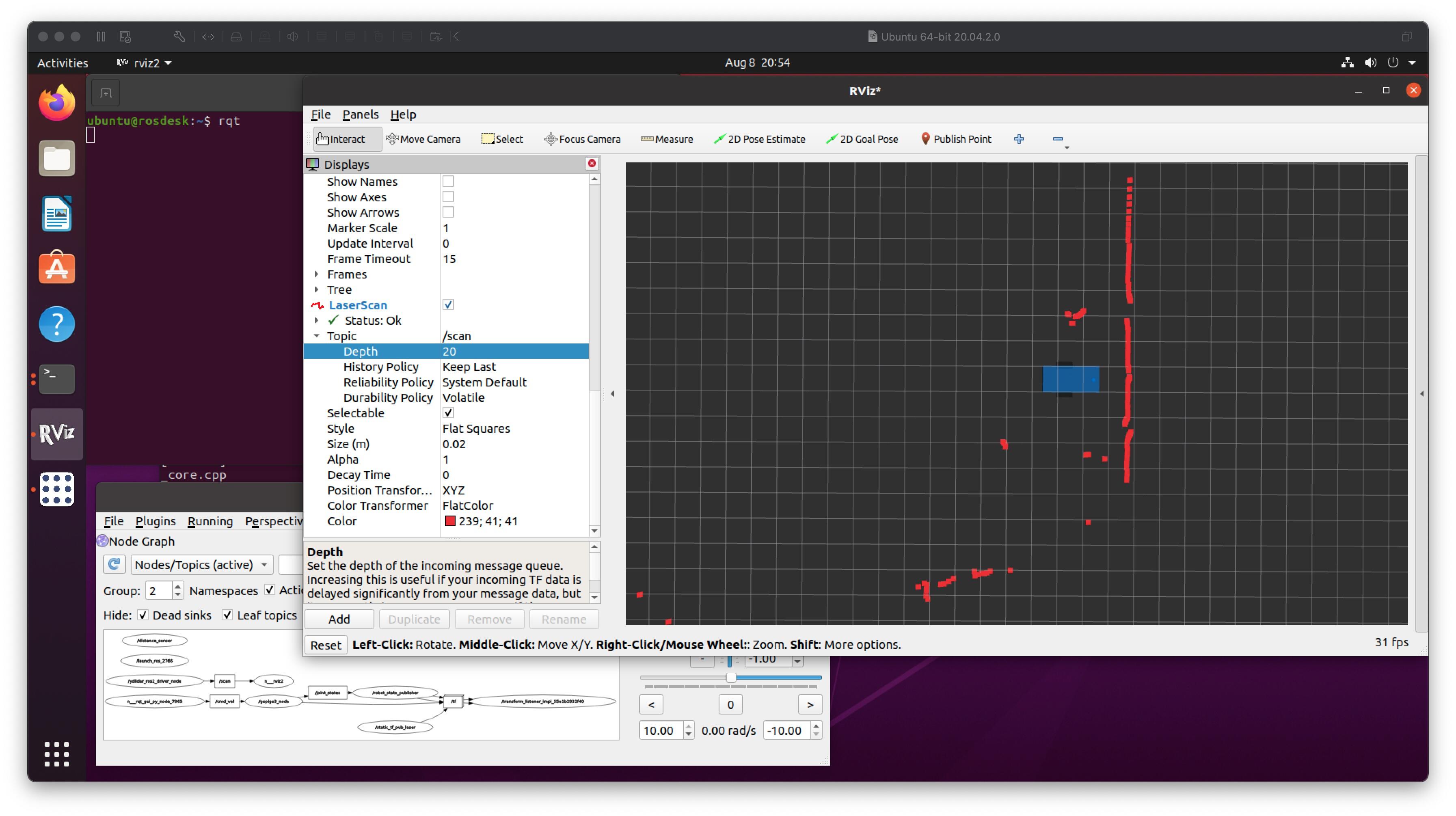
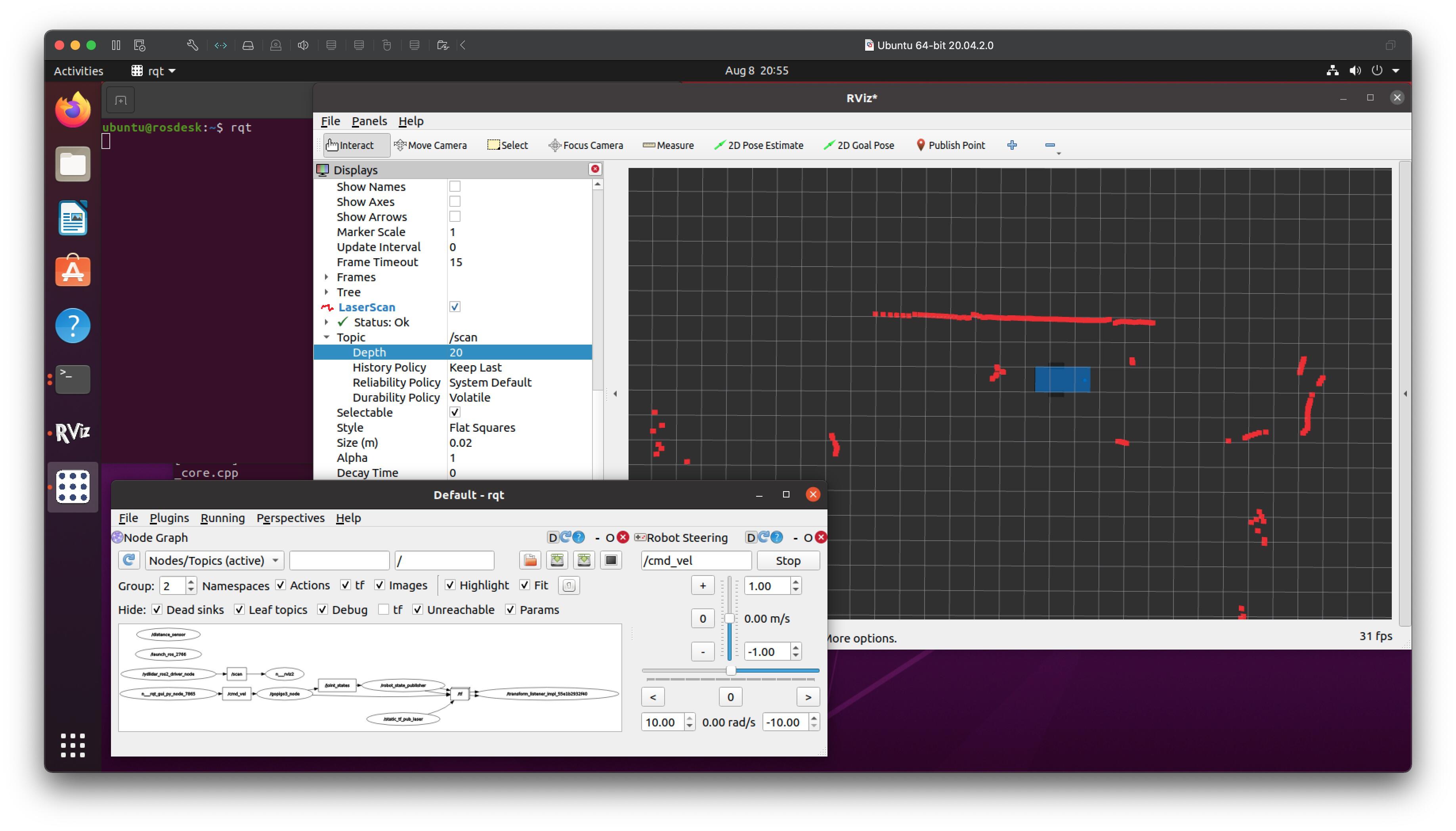
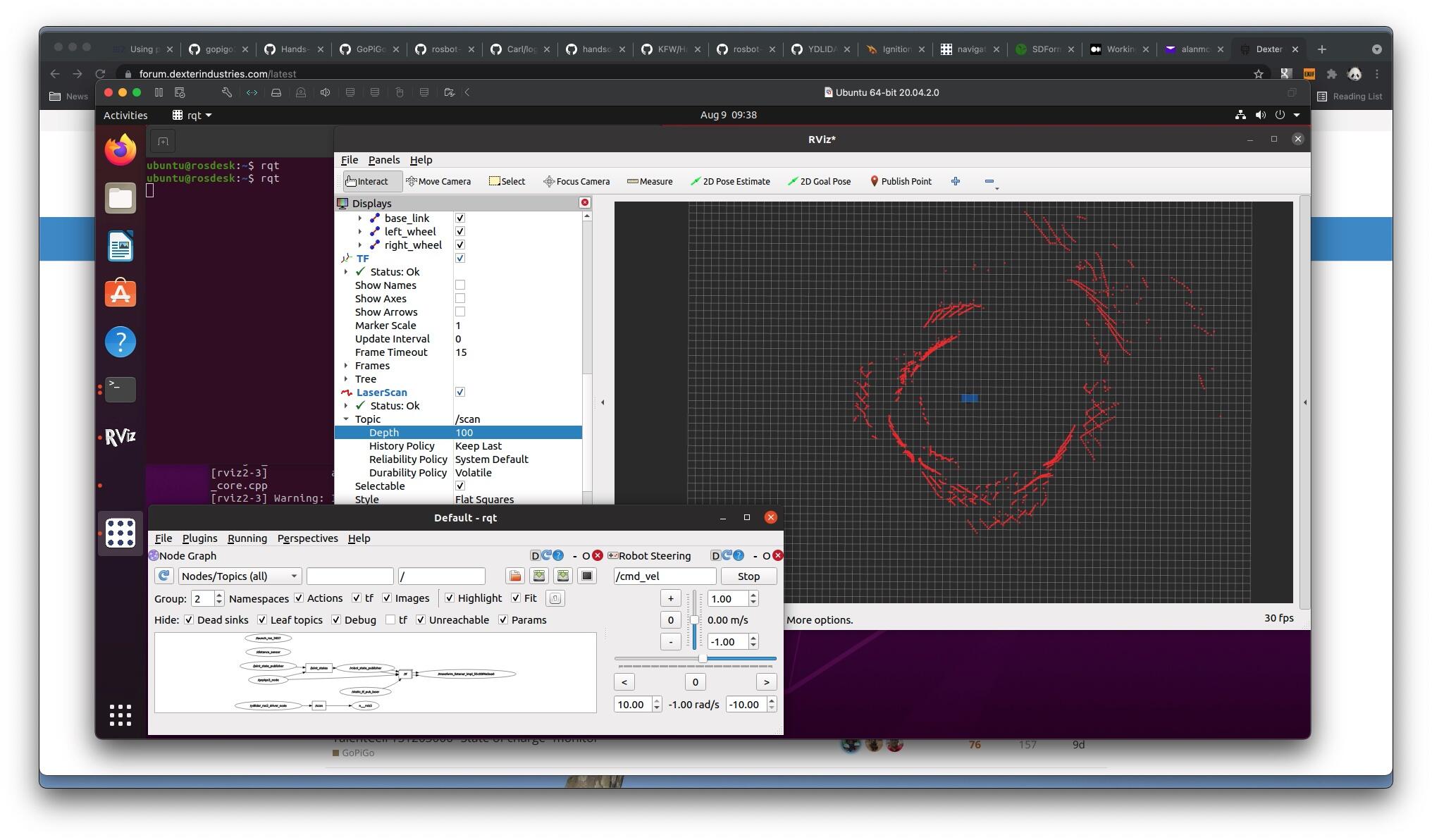
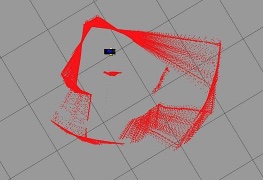
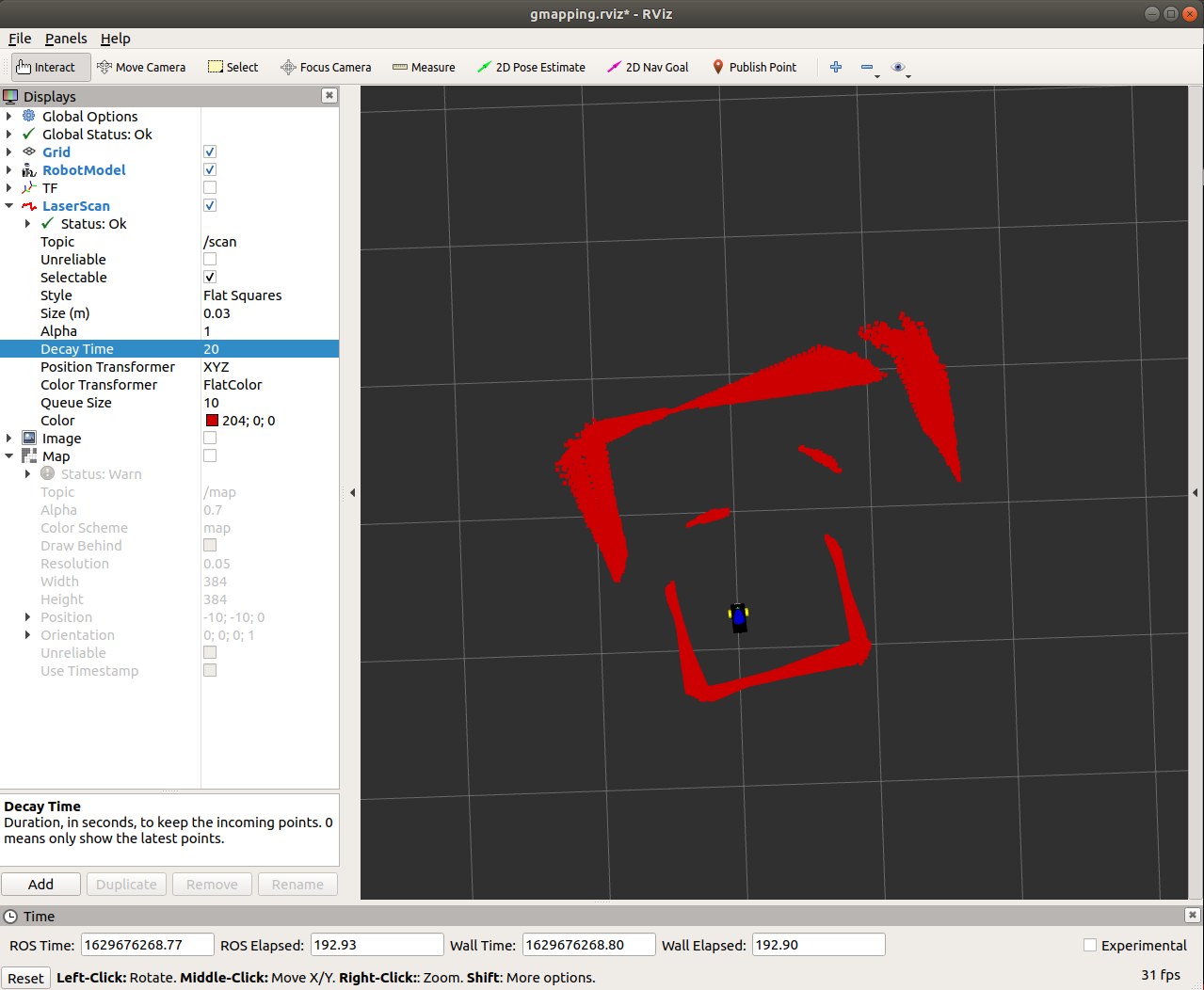
I only got to step 1.2 before I found trouble. I did the “turning in place test” suggested, only to discover my odometry seems to be terrible:
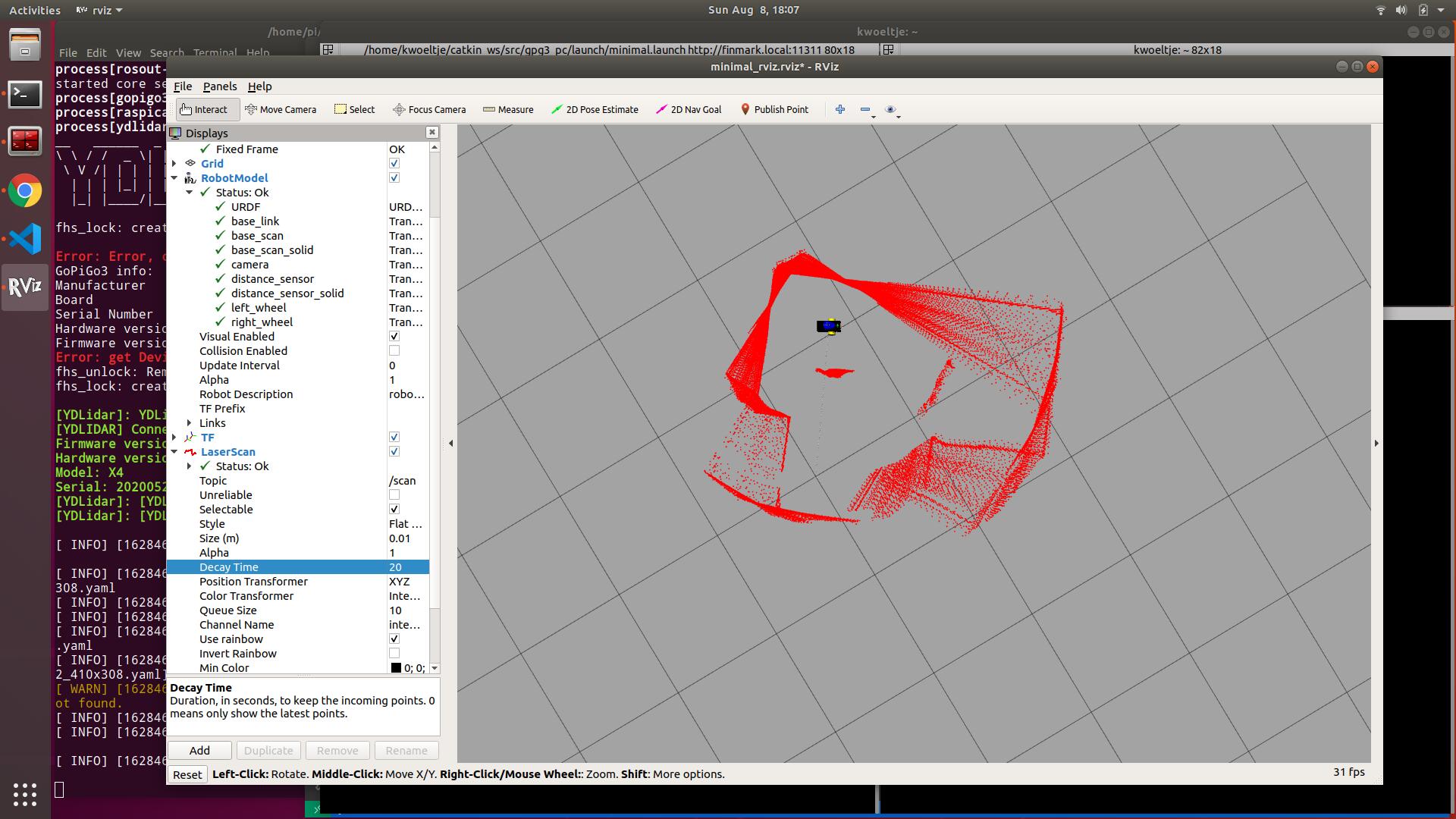
This is 20s of laser scan data superimposed (decay time of 20) with the fixed frame set to /Odom. The walls should stay in place but you’ll see the wide spread of the wall positions. So clearly I have a problem. This doesn’t explain my localization problem (the robot position being jittery even in place), but still a problem I’ll need to work on.
Right now I think /Odom is based entirely on the wheel encoders. I’ve got the wheel settings calibrated now, so that shouldn’t be an issue. One thing I’d like to do is figure out how to add in the IMU data.
@cyclicalobsessive - if you try this test what do you get? I’m wondering if it’s just me.
/K