Recently acquired a GoPiGo through an Educational workshop on the hardware. It came with an UltraSonic Sensor. However, I can not get it to work. I have tried the dist code, and even the example, but no matter where it is placed in relation to an object the returned value does not change. Could there need to be more programming, or perhaps I have a bad sensor. Thank for any help.
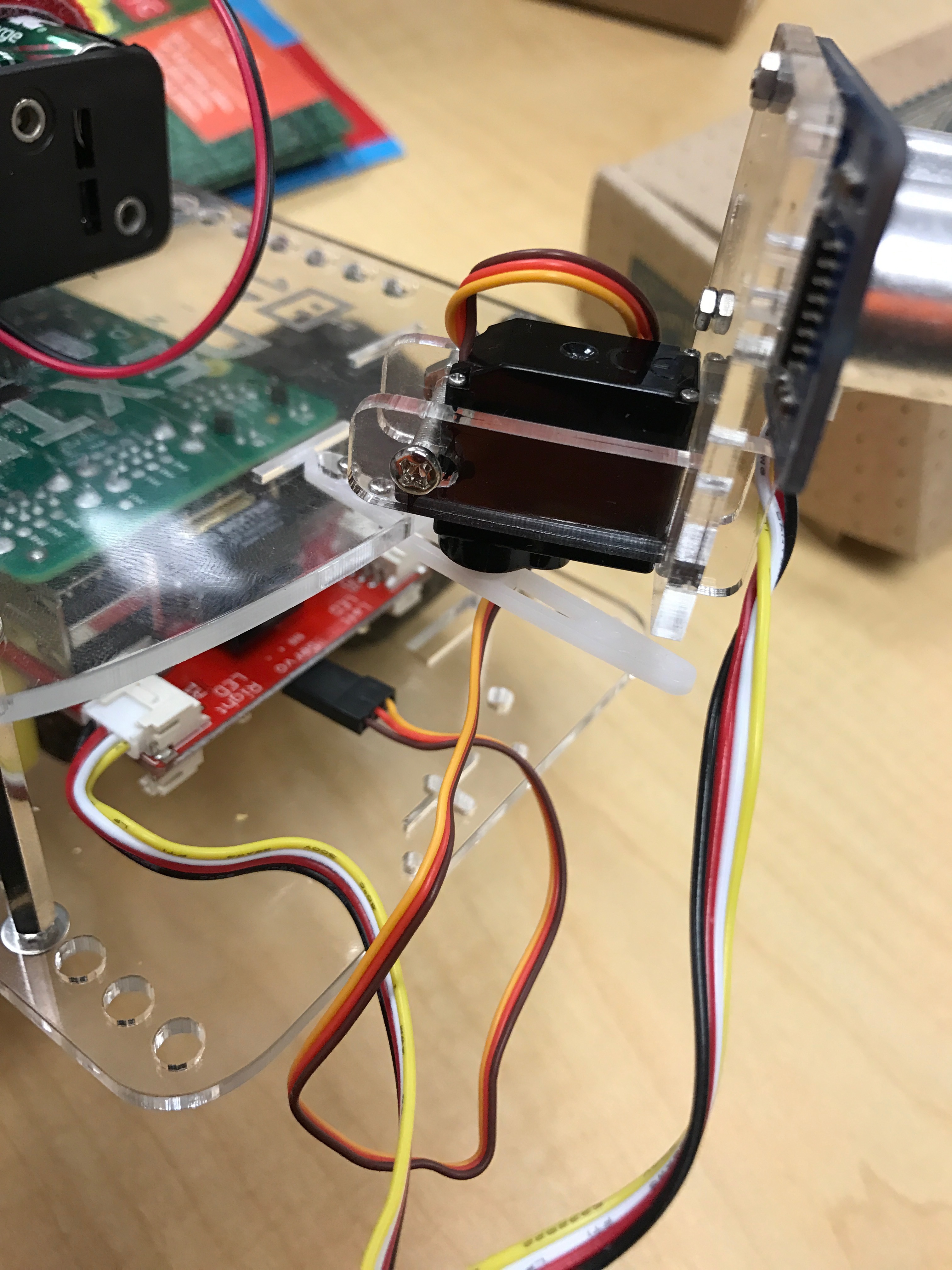
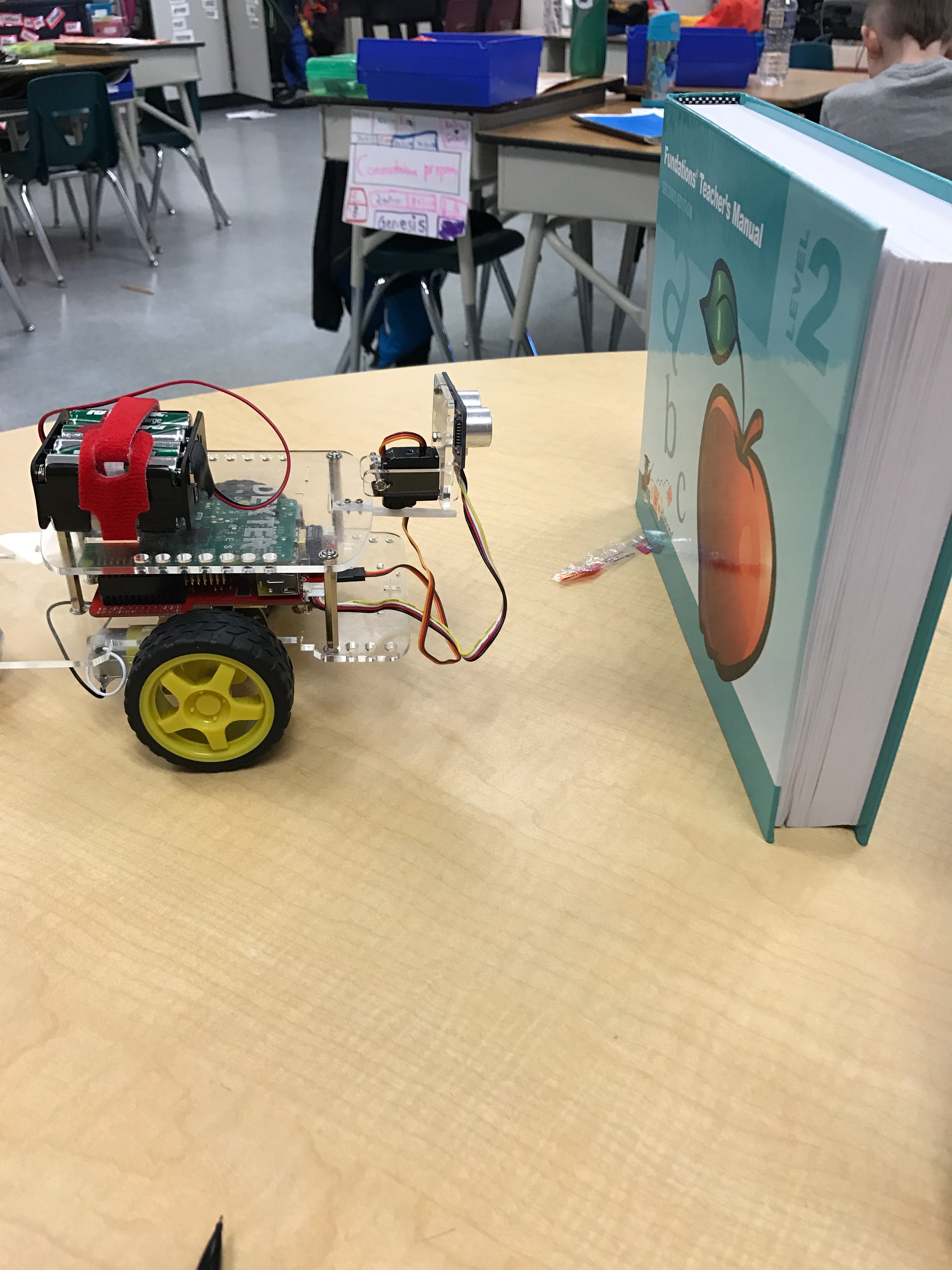
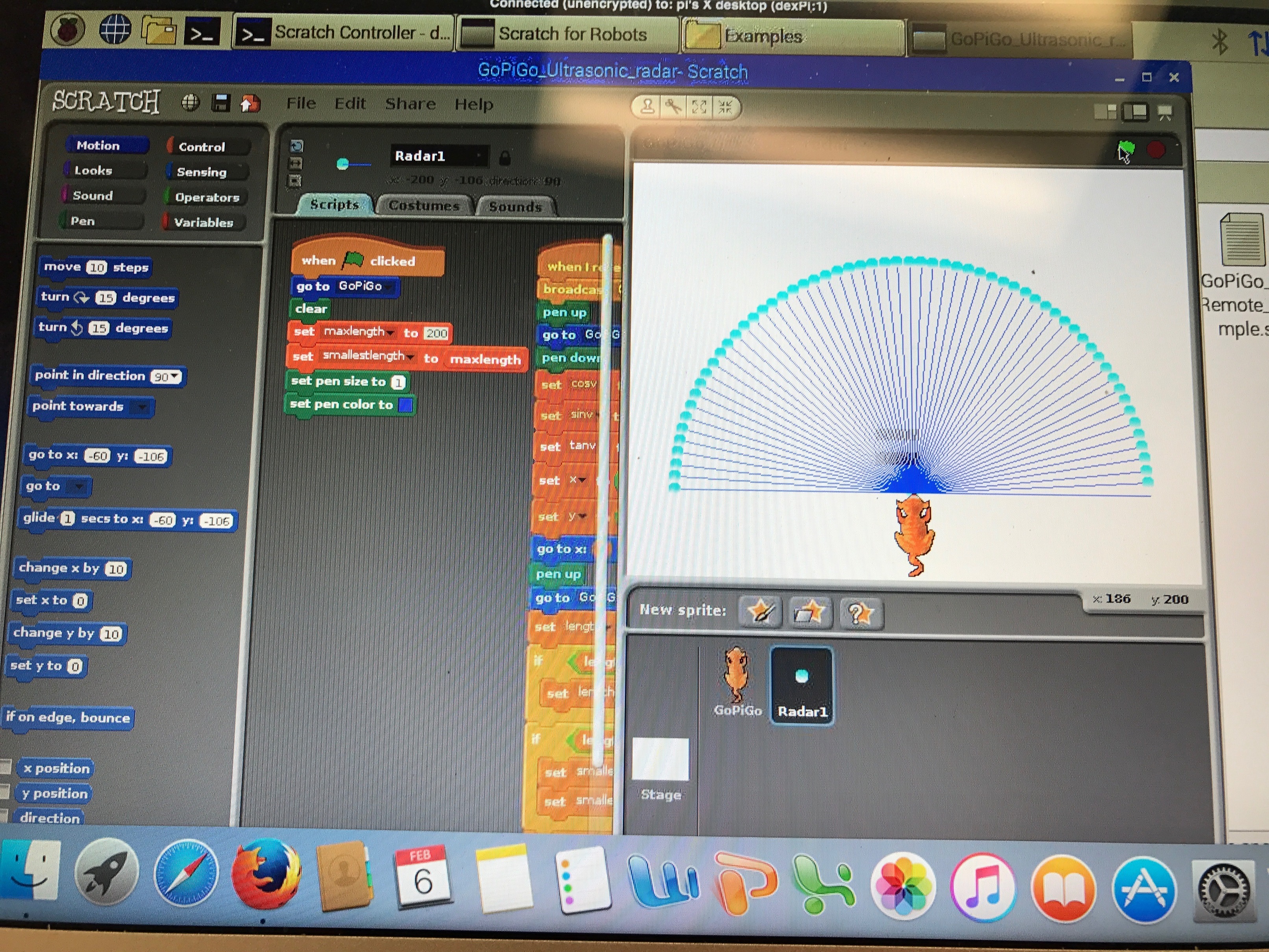
Can you send us a screenshot of the output that you are getting. Can you also send us a few pictures of the ultrasonic sensor connected to GoPiGo and code that you are using.
Along with these if you are using our Raspbian for Robots image, follow this guide, generate a test log and post it along with your reply.
-Shoban
I am using raspbian for robots. I am also haveing an issuse with the onboard wifi and bluetooth. Becuase of that Issue I am able to access the pi but not able to get it online after accessing it, and I was not able to get the Log.txt into for my pi desktop to the computer. I will try again if I am able to connect through ethernet.
Check space left
Filesystem Size Used Avail Use% Mounted on
/dev/root 3.6G 3.0G 364M 90% /
devtmpfs 427M 0 427M 0% /dev
tmpfs 432M 0 432M 0% /dev/shm
tmpfs 432M 6.2M 425M 2% /run
tmpfs 5.0M 4.0K 5.0M 1% /run/lock
tmpfs 432M 0 432M 0% /sys/fs/cgroup
/dev/mmcblk0p1 63M 21M 43M 33% /boot
tmpfs 87M 0 87M 0% /run/user/1000
Check for dependencies
python 2.7.9-1 install ok installed
python-pip 1.5.6-5 install ok installed
git 1:2.1.4-2.1+deb8u2 install ok installed
libi2c-dev 3.1.1+svn-2 install ok installed
python-serial 2.6-1.1 install ok installed
python-rpi.gpio 0.6.3~jessie-1 install ok installed
i2c-tools 3.1.1+svn-2 install ok installed
python-smbus 3.1.1+svn-2 install ok installed
arduino 2:1.6.0 install ok installed
minicom 2.7-1 install ok installed
scratch 1.4.0.6~dfsg1-5 install ok installed
wiringPi Found
wiringPi Found
I2C already removed from blacklist
SPI already removed from blacklist
Check for addition in /modules
I2C-dev already there
i2c-bcm2708 already there
spi-dev already there
Hardware revision
gpio version: 2.36
Copyright © 2012-2015 Gordon Henderson
This is free software with ABSOLUTELY NO WARRANTY.
For details type: gpio -warranty
Raspberry Pi Details:
Type: Pi 3, Revision: 02, Memory: 1024MB, Maker: Embest
- Device tree is enabled.
*–> Raspberry Pi 3 Model B Rev 1.2 - This Raspberry Pi supports user-level GPIO access.
Check the /dev folder
i2c-1
spidev0.0
spidev0.1
ttyAMA0
USB device status
Bus 001 Device 005: ID 0bda:8176 Realtek Semiconductor Corp. RTL8188CUS 802.11n WLAN Adapter
Bus 001 Device 004: ID 046d:c52b Logitech, Inc. Unifying Receiver
Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast Ethernet Adapter
Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=dwc_otg/1p, 480M
|__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/5p, 480M
|__ Port 1: Dev 3, If 0, Class=Vendor Specific Class, Driver=smsc95xx, 480M
|__ Port 2: Dev 4, If 0, Class=Human Interface Device, Driver=usbhid, 12M
|__ Port 2: Dev 4, If 1, Class=Human Interface Device, Driver=usbhid, 12M
|__ Port 2: Dev 4, If 2, Class=Human Interface Device, Driver=usbhid, 12M
|__ Port 3: Dev 5, If 0, Class=Vendor Specific Class, Driver=rtl8192cu, 480M
Checking for Atmega chip
avrdude: Version 5.10, compiled on Jun 18 2012 at 12:38:29
Copyright © 2000-2005 Brian Dean, http://www.bdmicro.com/
Copyright © 2007-2009 Joerg Wunsch
System wide configuration file is "/etc/avrdude.conf"
User configuration file is "/root/.avrduderc"
User configuration file does not exist or is not a regular file, skipping
Using Port : unknown
Using Programmer : gpio
AVR Part : ATMEGA328P
Chip Erase delay : 9000 us
PAGEL : PD7
BS2 : PC2
RESET disposition : dedicated
RETRY pulse : SCK
serial program mode : yes
parallel program mode : yes
Timeout : 200
StabDelay : 100
CmdexeDelay : 25
SyncLoops : 32
ByteDelay : 0
PollIndex : 3
PollValue : 0x53
Memory Detail :
Block Poll Page Polled
Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack
----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- ---------
eeprom 65 5 4 0 no 1024 4 0 3600 3600 0xff 0xff
flash 65 6 128 0 yes 32768 128 256 4500 4500 0xff 0xff
lfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
hfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
efuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
lock 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00
calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00
signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00
Programmer Type : GPIO
Description : Use sysfs interface to bitbang GPIO lines
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.00s
avrdude: Device signature = 0x1e950f
avrdude done. Thank you.
Checking I2C bus for devices
Checking I2C bus 0
Error: Could not open file /dev/i2c-0' or/dev/i2c/0’: No such file or directory
Checking I2C bus 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: – -- – -- – 08 – -- – -- – -- –
10: – -- – -- – -- – -- – -- – -- – -- – --
20: – -- – -- – -- – -- – -- – -- – -- – --
30: – -- – -- – -- – -- – -- – -- – -- – --
40: – -- – -- – -- – -- – -- – -- – -- – --
50: – -- – -- – -- – -- – -- – -- – -- – --
60: – -- – -- – -- – -- – -- – -- – -- – --
70: – -- – -- – -- – --
Checking for firmware version and CPU Speed and Voltage
v 1.6
CPU speed: 2
6.85 V
CHECKING ENCODER READINGS
0 0
Both motors moving Forward with LED On
after 5 sec 117 111
Both motors stopped with LED Off
None after stop cmd 122 115
None after 2 more sec 123 115
Both motors moving back with LED On
after 5 sec 236 224
Both motors stopped with LED Off
None after stop cmd 241 227
None after 2 more sec 242 227
CHECKING ENCODER TARGETING
Initial encoder read vals: 0 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 0
Final encoder read vals: 75 73
Initial encoder read vals: 0 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 0
Final encoder read vals: 73 73
Initial encoder read vals: 0 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 0
Final encoder read vals: 73 73
Initial encoder read vals: 0 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 0
Final encoder read vals: 73 73
Initial encoder read vals: 0 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 1
Enc tgt Status: 0
Final encoder read vals: 73 73
V 7.0
This version of Raspbian was modified by Dexter Industries on the Jessie Raspbian Build.
This version was updated on 2016.10.05
#############
Start: Fri 3 Feb 18:49:07 EST 2017
End: Fri 3 Feb 18:54:56 EST 2017
Cinch Installed.
Thanks a lot for sharing the log, just to confirm if the ultrasonic sensors are working, can you run this python program by commenting line 44 and uncommenting line 45. After running share with us the screenshot of the output. This code can be found in /home/pi/Desktop/GoPiGo/Software/Python/sensor_examples/ in your Pi.
-Shoban