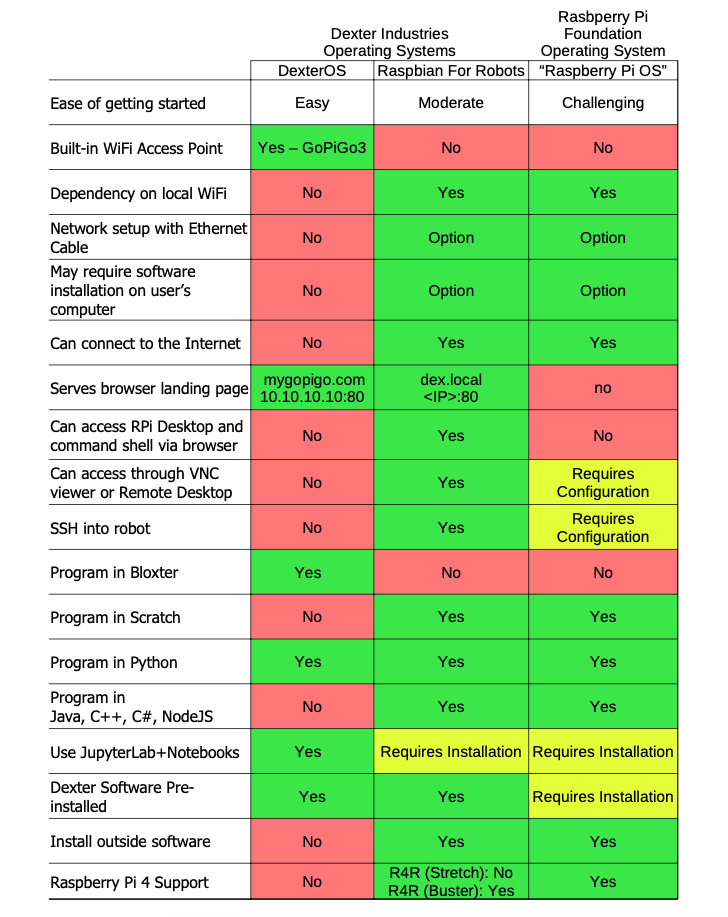
There are three main choices for an operating system to use with DI/ModRobotics products:
-
DexterOS: https://www.dexterindustries.com/download/dexteros
-
Raspbian For Robots (R4R): https://sourceforge.net/projects/dexter-raspbian-for-robots/files/
a) Stretch Based (Not for Pi4)
b) Buster Based “Experimental” (For Pi4 and Pi3) -
GoPiGo3_Ubuntu18.4_ROS_Melodic (Available on same site as R4R)
https://sourceforge.net/projects/dexter-raspbian-for-robots/files/
Note: A GoPiGo3 ROS node can be built over Raspbian For Robots by the user, or is available pre-built over Ubuntu.