Greetings!
Which side of the Dexter Industries IMU is the “front”?
The flat side or the component side? I’d really like to avoid getting Charlie any more confused than he already is. 
Greetings!
Which side of the Dexter Industries IMU is the “front”?
The flat side or the component side? I’d really like to avoid getting Charlie any more confused than he already is.
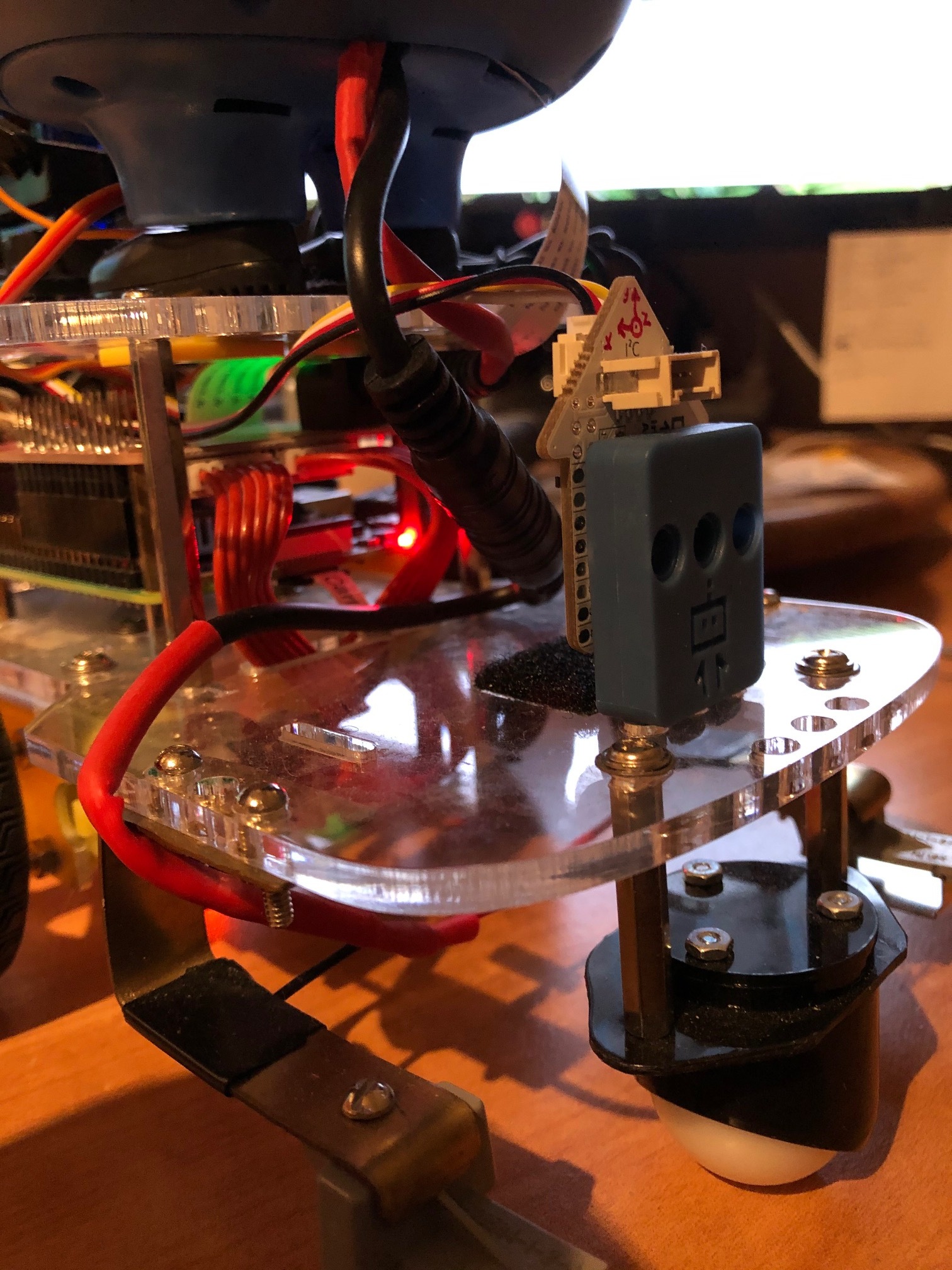
# using the x and z axis because the sensor is mounted vertically
# the sensor's top face is oriented towards the front of the robot
Check me on this:
If I understand your diagram rightly:
The side of the IMU represented by the dot is the component side. (i.e. Component side up.)
The “pointed” end of the IMU should face toward the “front” of the robot.
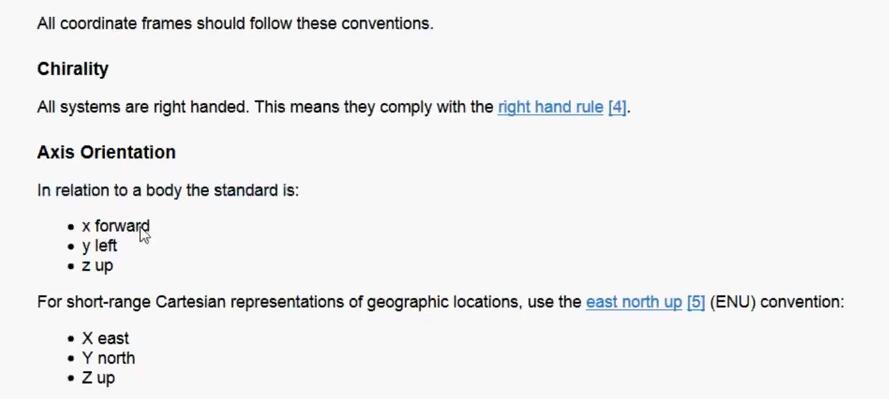
If this is true, then the three axes would represent the following:
(a) Rotation around the “Y” axis represents “roll”
(b) Rotation around the “X” axis represents “pitch”
(c) Rotation around the “Z” axes represents “yaw”.
However. . . .
I remember seeing a picture of Carl showing the Dexter IMU on the back of the 'bot, point up, component side facing toward the back.
The Dexter Industries sensor mount’s sensor mounting pins, the mounting holes on the IMU that fit those pins, and the mounting holes on the GoPiGo that fit the three mounting studs on the sensor mount, don’t anticipate a horizontal mounting axis for the IMU.
Confusion reigns supreme.


Yes, saw that also, and initially installed it that way, but when I ran the compass bot example requesting North made the bot face South.
So I turned it around so component side facing the front: (shot from rear of bot)