I have a lot of “robot wishes”, most of which I don’t have time, knowledge, or enough desire to pursue making my wishes come true. Carnegie Mellon University has been implementing machine learning robots for many years, why should my robots require me to program every single function they need.
Some of my wishes over the years:
- GoPiGo3 Simulator for trying Python programs, and ROS 2 GoPiGo3 Simulator for trying ROS 2 programs
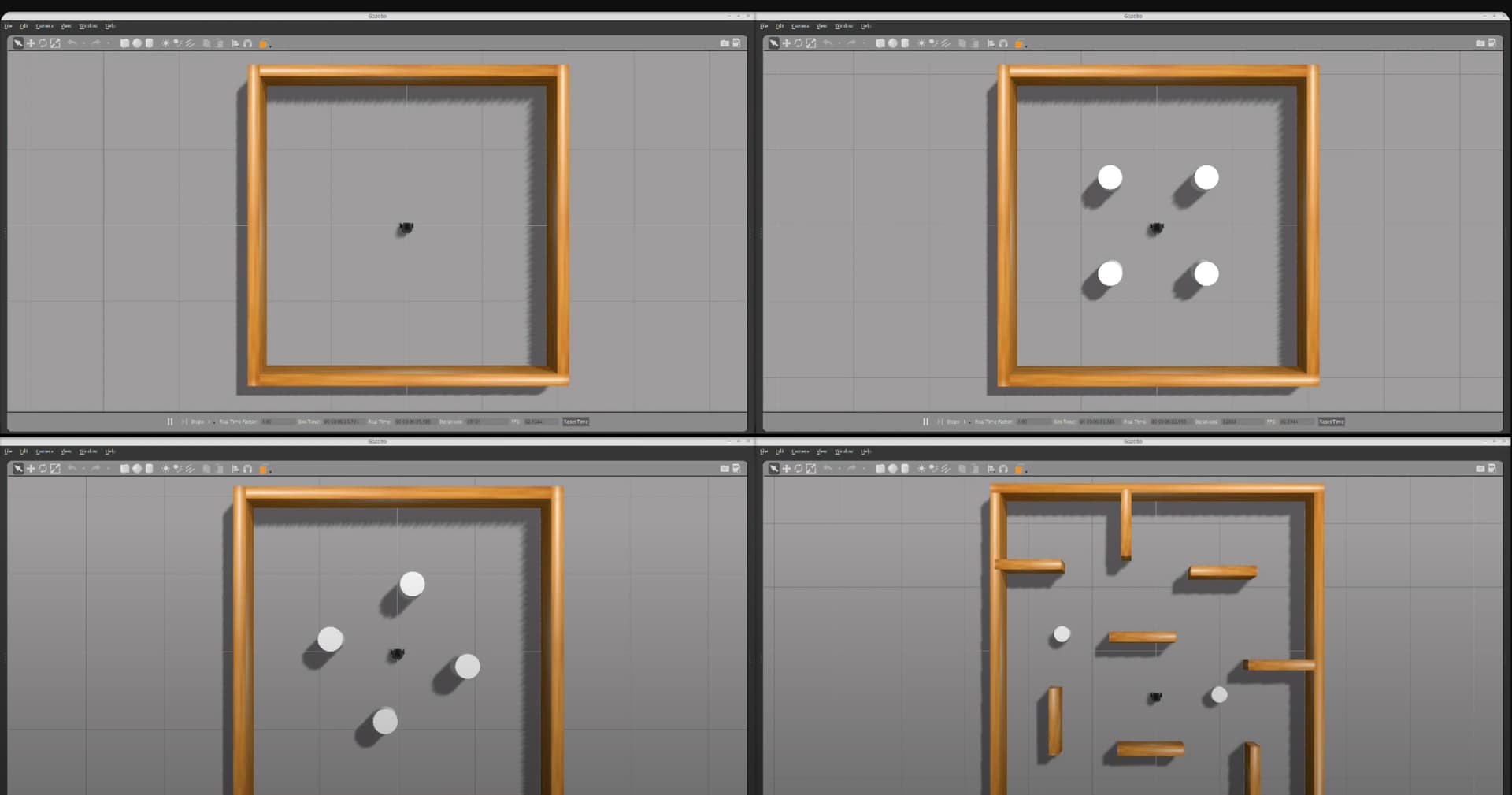
- Basic Simulation “world” of a square room with a couple obstacles
- A machine learning program that I could give a GoPiGo3 robot a goal, and the program would run in a simulator on my desk to build a AI model that would solve the goal for my real GoPiGo3 robot.
- For example: Given a map of my house with the dock position and kitchen marked, find a path from the dock to the kitchen
- Example: Given Dave’s dock with an ArUco marker behind the dock, and various poses (position + heading) of Dave in the room with the dock/marker, build a model that drives Dave onto the dock successfully.
Turtlebot3 has had a simple to install robot simulation application for years.
Turtlebot3 has had simple to install ROS mapping for years.
Turtlebot3 has had simple to install ROS navigation for years.
In my quest to convert the Turtlebot3_Gazebo package for GoPiGo3, I kept seeing a bunch of files with “dqn” - there were dqn_stage1/2/3/4_world files, but I didn’t see anything that used them so I deleted them all.
Today, I wandered through the turtlebot3_machine_learning GitHub repo and discovered that dqn_stage2_world is exactly the basic square simulated world I was wishing for,
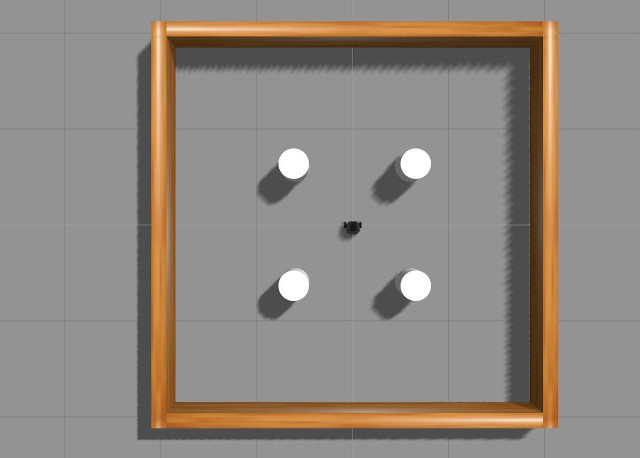
and further they have a ROS 2 dqn_agent to run that does exactly what I was wishing for - “Deep Q Net” will learn to drive a Turtlebot3 robot to a goal. (Albeit the code is five ROS 2 versions stale.)
It seems like I might have saved myself a lot of headaches and time, by buying a Turtlebot3 instead of a second GoPiGo3 to create “ROSbot Dave”. (Or more probably had headaches at a somewhat higher functionality level.)
p.s. the really great video