I found Carl did a “face plant” at his dock this morning. His log reported “Possible Docking Failure, cannot undock” at 480 hours (20 days) since last reboot. (His distance sensor claimed something was blocking his dismount … yeah … the floor, you dummy.)
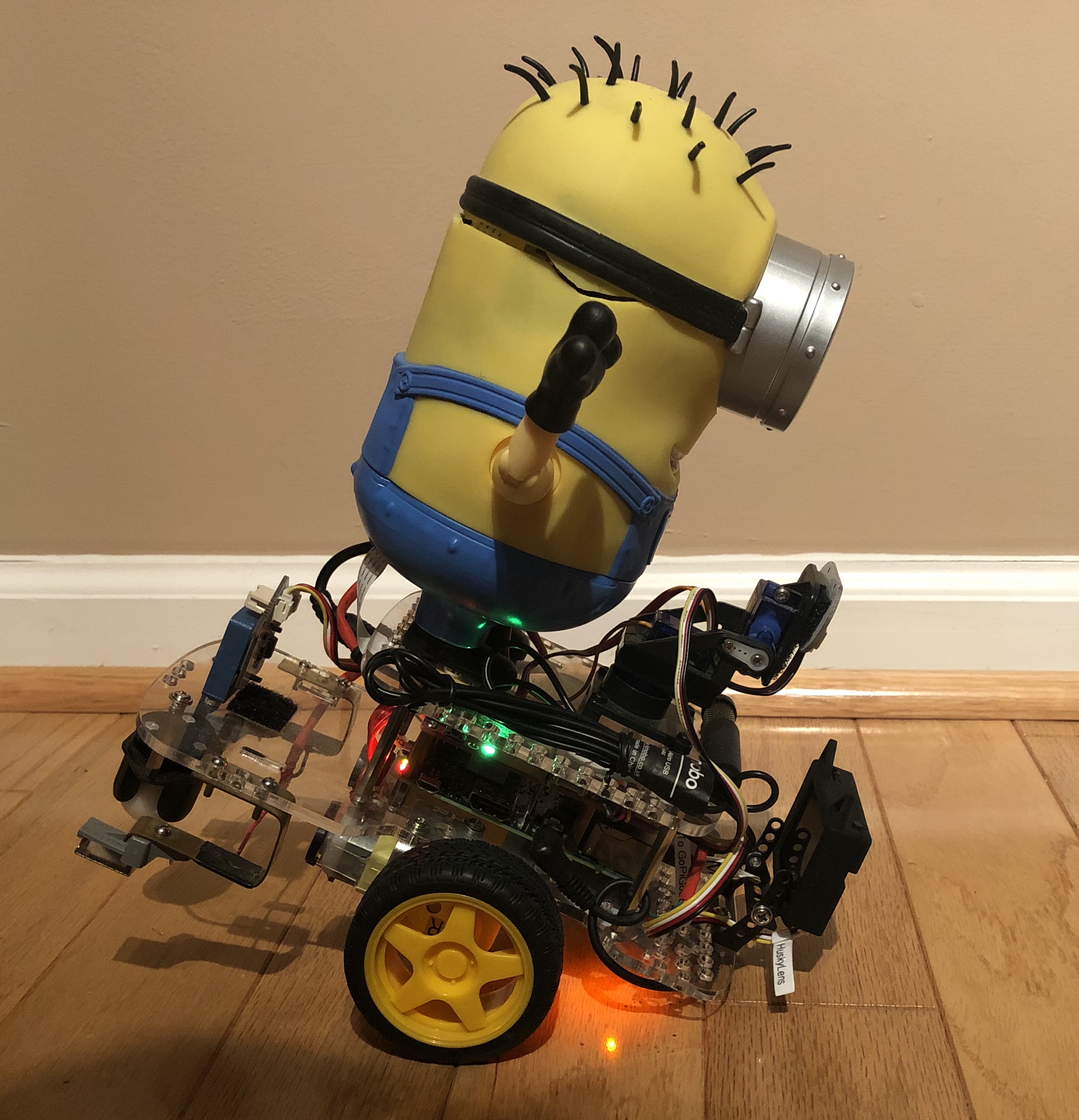
I have been ignoring the z axis (climb/decent) and pitch data from the IMU, but see now that I need to create a “face plant” alert based on the IMU pitch data.
If Carl initiates a drive backward at max speed, then reverses to forward max speed, he gets a successful attitude adjustment (without a beer!).

Stuff you learn when you run a robot 24/7 - non-virtual reality.