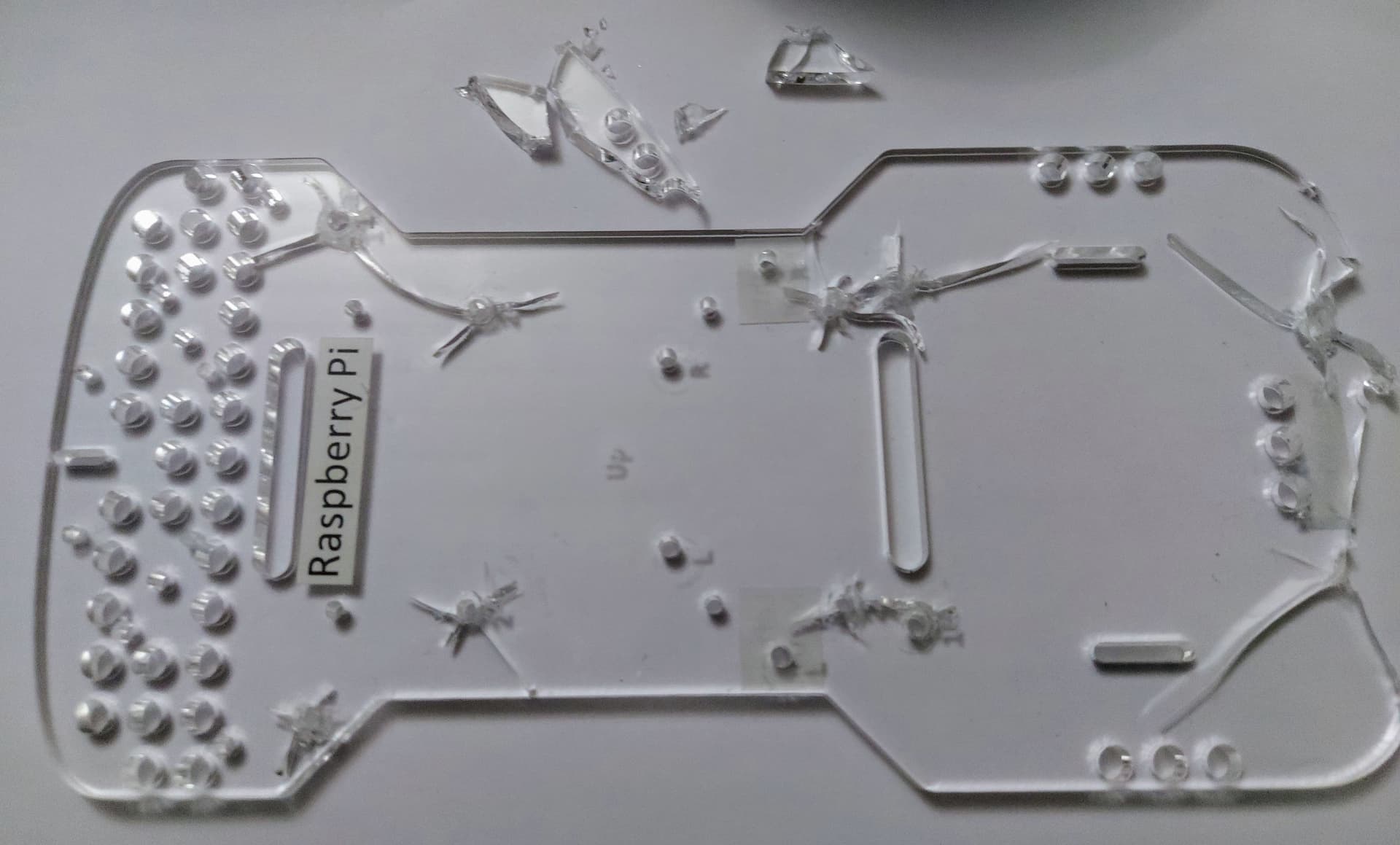
(Charline’s bottom plate - what’s left of it, that is.)
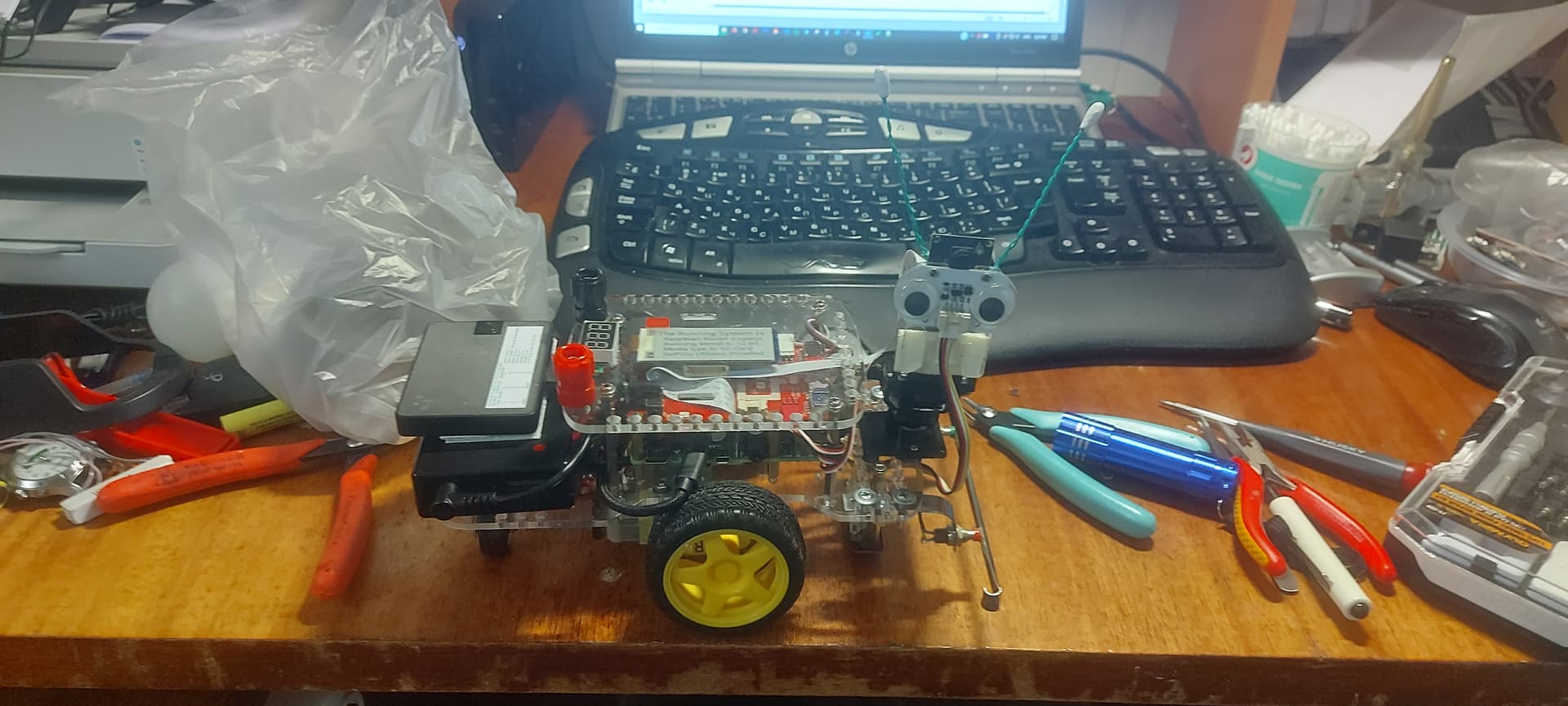
Charline was 99% assembled. All that was needed was a battery for the Adafruit RTC board and the top acrylic cover - and she’d be ready to go with a shiny new Pi-4b and a latest version Pi-Camera 3 on her pan-and-tilt. . . .
All the software for both the Pi-4 and Pi-5 was downloaded, flashed to SD cards, preliminary configuration done, and ready to go.
This afternoon, (after finishing a carburator rebuild for the snow blower), I sat down to put the finishing touches on Charline only to discover that almost everywhere something passed through the acrylic bottom plate, the acrylic had cracked to the point that large pieces had fallen off at the caster’s connection at the back of the road, leaving a slew of tiny, (and quite sharp!), acrylic shards all over the table. Not to mention serious cracks almost everywhere else that threaten to break the acrylic into even more pieces.
The bald statemen “I am incredibly disappointed” is a masterpiece of understatement. Especially since I was careful to avoid over-tourquing the fasteners.
I have already created an issue on the MR support site and I repeated the suggestion I made on my very first post on these forums: There should be fiber washers everywhere a post or screw makes contact with the acrylic.
I’m glad that I have an extra bottom plate!
Edit:
Moved to the GoPiGo forum from the lounge so others can see.
What makes this especially frustrating is that I wanted Charline to be completed before I go into the hospital, (tomorrow, Monday, February 19th), for another total knee replacement. The idea being that I could still begin my research even with limited mobility for the next couple of months.
The real root cause, (as far as I can tell based on the evidence given), is point-source stress where a small object passes through and/or makes contact with the acrylic. Since there’s nothing to diffuse the stress away from that single point, stress cracks are inevitable.
Way, way back, many centuries ago, not long after the bible began. . . (Joseph and his Technicolor Dreamcoat)
. . . actually, within my very first post on these forums, back in January 2019, I made the following suggestion:
Though many of the suggestions I made then we’re implemented, (especially the suggestion to sub-divide the parts into smaller labeled bags), the most important suggestion - fiber washers - remains to be done.
This is especially tragic as it’s not difficult to imagine a bunch of school kids torquing down the fasteners and endint up with a bag of sharp acrylic shards instead of a robot.
This, IMHO, is the most important, and most critical change that needs to be made, and it needs to be made ASAP.
There are a few measurements that I plan to make around the running and shutdown signals with the idea of having the GPG controller enable and disable the supplemental +5v supply when starting up and shutting down.
This avoids yet another piece of software to track.
Now, where did I put my 2N2222 transistors?
I’m also planning to start building Charline again, using the washers I bought to protect the acrylic baseplate.
BUT software solutions (when they work) are more easily reusable by the community.
I was looking for a quick and easy morse code practice iambic keyer for the Raspberry Pi. (Iambic keyers have one paddle for “dits” and one for “dahs”.) Found a well designed, well documented package on GitHub that I had running in less than 60 seconds after finding it.
On the physical side, It needed a GPIO connector, a breadboard, three 1k resistors, a 10uF cap and a physical dual paddle key. Searching for the components caused a long delayed, day long “reorganize these drawers” out in the garage, and then continued the next day to several hours building a dual paddle key from paper clips, and another couple hours the next day to mount, wire, and solder the few electronic components.
Wow - it works! … well the software at least. The software debounce is not able to reliably catch the “paddle off” transition. Should have just sprung for the $20 fully assembled, fully working keyer on Amazon. The reason I went into software was because every electronics project I tried as a kid failed. At 72 years old I’m still learning that lesson.
Secret of success for hardware or software, but software is free and quick. My electronics junk drawer never has sufficient content, and the more I work on an electronic project the messier it looks. Software “mess” is hidden away from the get-go, but successful electronic projects need an expensive enclosure with drilling and labeling- more time and more money. Software is just my thing.
I had the luck of a father, relatives, and friends that were into hardware when I was young[1] [2] - and software solutions didn’t exist so I was stuck.
Also “failure” never really bothered me. I was used to failure since I was a total eff-up at most everything I did. If nothing else, it taught me patience since I knew it could be done with the correct tools and sufficient skill.
Most of the people I knew had learned electronics/radio during WWII, or immediately after the war. A copy of Elements of Radio, published by Western Electric in the early '60s as a training text, was one of the best gifts I’d ever received, and I still have it to this day.
My father worked for Western Electric at the time so I had a bottomless supply of telephone dry-cell batteries, wire, (from 200 pair telephone cable), 1lb rolls of solder and a 300w American Beauty soldering iron. Wood and nails from nearby housebuilders and a rich supply of cast-off materials in garbage cans was also a huge incentive.