Hello, I’ve got a 3d scanner, which I’m completely glad with. Some time ago on manufacturer’s site I saw a robotic hand, that can manipulate the scanner itself. Unfortunately it seems they are not selling it now. So i’m thinking about building such robot myself. I understand how and on which angels the scanner should move, so programming part wouldn’t be a problem, but I’m completely noob with hardware. So I need your help.
1 Like
Hi @bmacey,
We can’t offer the solution on the table, but we can give you a direction that’s going to help you do this project.
Personally, if I were you, I’d start with something really small and then, incrementally, move to something bigger.
But, if you’re a complete noob as you said, then this thing can take years, so you need to embark for a long “trip”.
Here’s the Yerkes Dodson curve that shows the relationship between stress (or as it’s called the arousal) and performance.
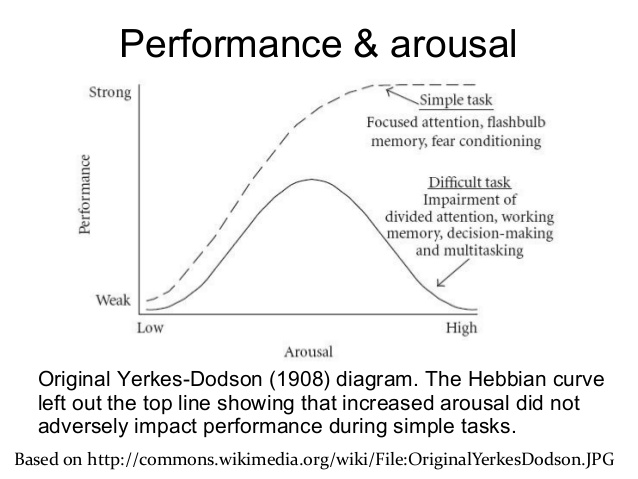
As you can see, you get the best performance when you balance out the difficulty of a project with the skills you have at a specific moment in time.
The harder the project, the less productive you get, and the more time you spend on it without getting any results - frustration and anxiety settle in and the next step is to quit.
So this proves the point that we need to evaluate our skills and determine what challenges we can accept and take.
Regarding the hardware stuff, I’d start with instructables.com as there are so many projects that you’ll need a lifetime to get through all of them - joking … or maybe not.
Here’s a project I found on a simple google search on instructables.com:
This is just a sample, so you can look for better alternatives and find something more suitable to you.
Again, start small - maybe use just one servo at a time and then increment.
You’re going to feel really good when you see that something is moving around.
I’ll be here for any other questions you might have and I’m happy to help you.
Thank you!
3 Likes
Sounds like a way cool task 
But as always these things always end up taking much longer and being much more complex than first thought.
I always love taking on these sorts of challenges. There is a number of ways of making a robotic arm and the sort of design posted above by RobertLucian (servo controlled) is probably one of the easiest to make.
Some considerations: How accurate to do need it to be, how much force does it need to be able to generate(lift heavy objects)
If you don’t need super accurate or powerfull then servos will be the go. If you need higher accuracy and more power you may need to look at linear actuators with feedback sensor.
Good luck
1 Like