Hi Everyone,
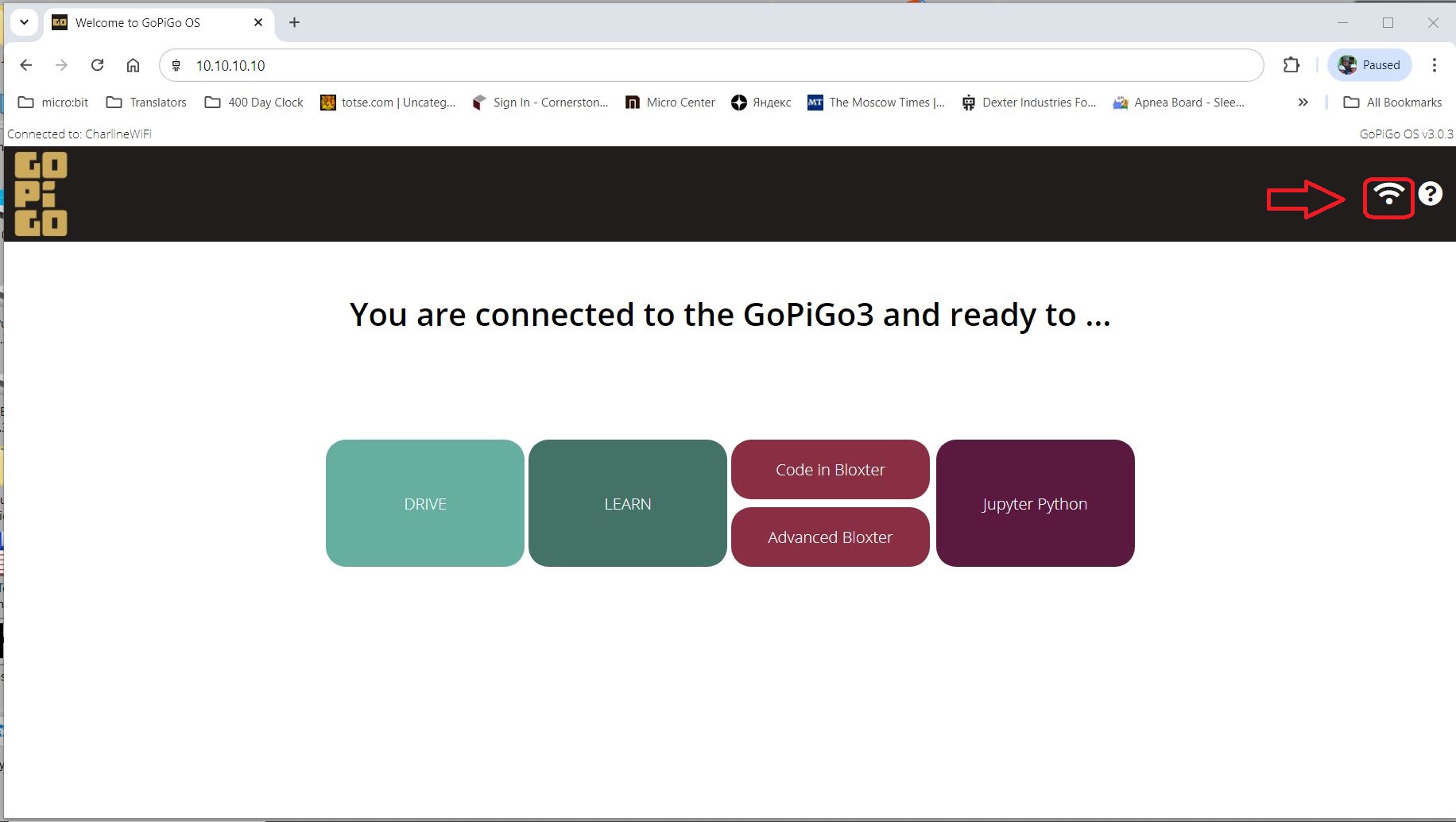
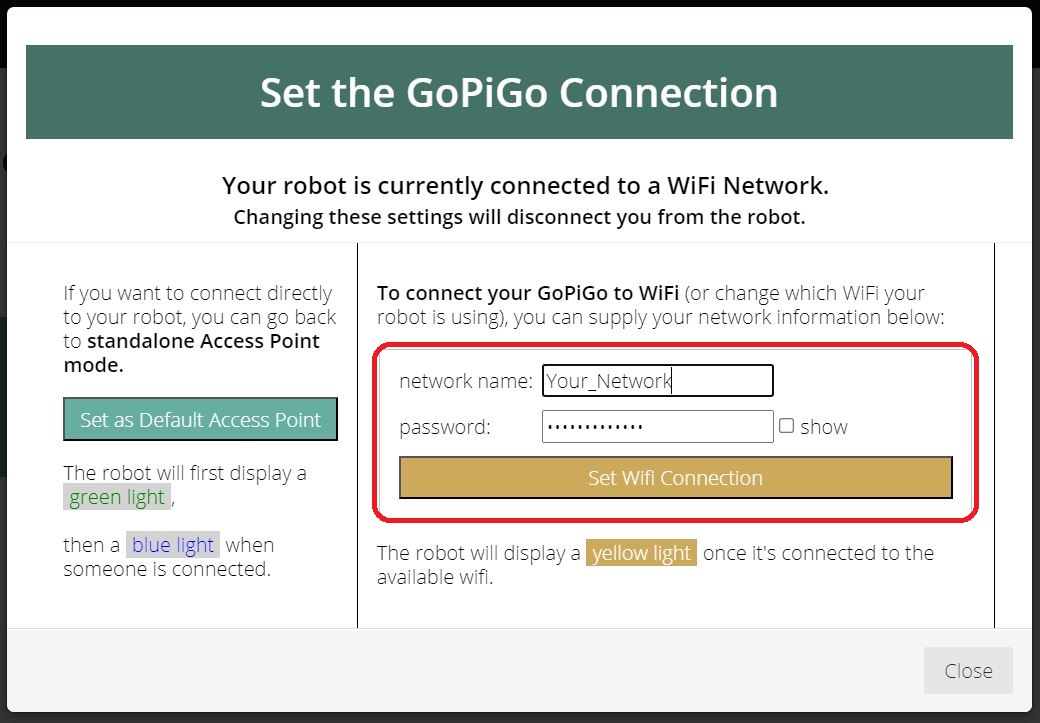
I am getting my GoPiGo’s ready for fall semester. I download and installed the GoPiGo OS 3.0.3 and have established a VNC connection.
sudo apt update
gives me the following messages.
Get:1 Index of /debian buster InRelease [38.6 kB]
Get:2 Index of /listing/uv4l_repo/raspbian/stretch stretch InRelease [38.6 kB]
Get:3 http://deb.nodesource.com/node_9.x buster InRelease [38.6 kB]
Get:4 Index of /raspbian buster InRelease [38.6 kB]
Err:1 Index of /debian buster InRelease
Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
Err:2 Index of /listing/uv4l_repo/raspbian/stretch stretch InRelease
Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
Err:3 http://deb.nodesource.com/node_9.x buster InRelease
Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
Err:4 Index of /raspbian buster InRelease
Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
Reading package lists… Done
N: See apt-secure(8) manpage for repository creation and user configuration details.
N: Updating from such a repository can’t be done securely, and is therefore disabled by default.
E: The repository ‘Index of /debian buster InRelease’ is no longer signed.
E: Failed to fetch http://archive.raspberrypi.org/debian/dists/buster/InRelease Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
N: See apt-secure(8) manpage for repository creation and user configuration details.
N: Updating from such a repository can’t be done securely, and is therefore disabled by default.
E: The repository ‘Index of /listing/uv4l_repo/raspbian/stretch stretch InRelease’ is no longer signed.
E: Failed to fetch http://www.linux-projects.org/listing/uv4l_repo/raspbian/stretch/dists/stretch/InRelease Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
E: Failed to fetch http://deb.nodesource.com/node_9.x/dists/buster/InRelease Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
E: The repository ‘http://deb.nodesource.com/node_9.x buster InRelease’ is no longer signed.
N: Updating from such a repository can’t be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.
E: Failed to fetch http://raspbian.raspberrypi.org/raspbian/dists/buster/InRelease Clearsigned file isn’t valid, got ‘NOSPLIT’ (does the network require authentication?)
E: The repository ‘Index of /raspbian buster InRelease’ is no longer signed.
N: Updating from such a repository can’t be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.
Thanks for your help!