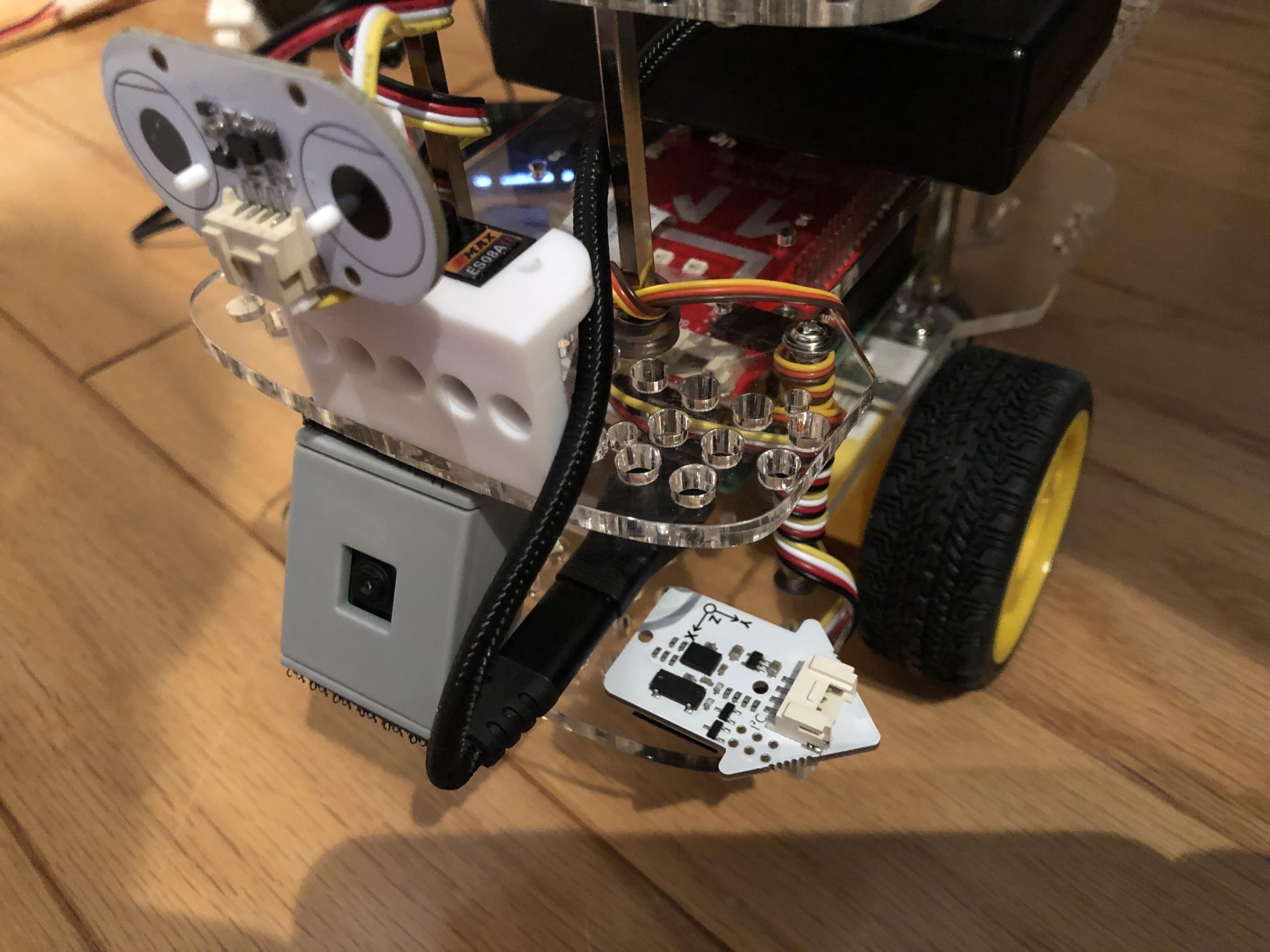
@KeithW, Originally, I was a little confused by Finmark’s IMU orientation shown in this pic:
which shows “x forward, y left , z up.”
(Love the screw mod to the sensor mount btw. I never have screws the right lengths, so I velcro everything.)
I had remembered that picture, but when I went about mounting the IMU on ROSbot this morning, I liked the arrow pointing forward, which puts “x right, y forward, z up”. I guess this is the reason I had so much trouble with differential calculus - my brain never accepted the “right hand rule.”
Last year I saved this “ROS_Coordinate_Frame” that says “x forward, y left, z up” - right hand rule:
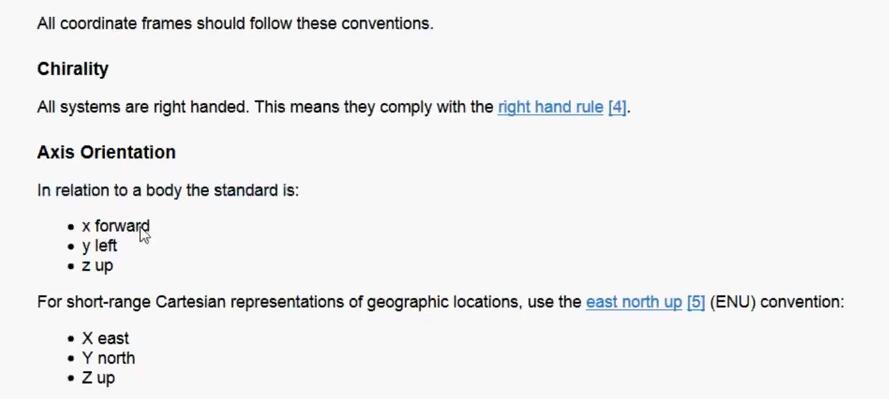
I contemplated initializing the IMU with a coordinate transform every time like I do in Carl, but looking at Finmark, and “getting right minded”, I moved the IMU to match your’s (and ROS):
CAUTION lest anyone following along this discussion decide to use AD2 for the IMU instead of AD1 - the easy_inertial_management_unit.EasyIMUSensor class will reverse the Z axis during the init, so don’t do it.