How Long Does A GoPiGo Go When It Doesn’t Go Go?
I was wondering “How long will my GoPiGo3 run if it only contemplates its navel?”
The following is the report of my experiment.
Required elements:
- GoPiGo3 with updated firmware
- Fully charged 8x AA NiMH cell batteries in standard GoPiGo3 battery holder.
- Configured Raspian For Robots with updated Dexter Industries software
- Optional: Voltmeter, DC-Clamp-On Ammeter, (or special cable and in-line ammeter)
Steps:
- Make sure batteries/battery pack is fully charged
– Each battery measures about 1.5v individually at no load
– Battery Pack measures about 12v at no load - Connect battery cable
- Press GoPiGo3 Power Button
- About a minute after power light turns solid green,
login to GoPiGo3 via ssh or browser terminal session - mkdir batterytest
- cd batterytest
- nano measureLife.py
- copy/paste the program below into the terminal window
- cntl-X, y to exit and save file
- chmod 777 measureLife.py
- type: ./measureLife.py (doesn’t shutdown properly with “python measureLife.py”)
- record first battery voltage reading
- record battery voltage reading every 60 minutes until GoPiGo shuts down
- Wait for blinking green light, then press power button to turn GoPiGo3 off
- Disconnect battery cable and connect to charger
- Compute average voltage (V1+V2+Vn)/n
Questions To Answer:
- How long will a GoPiGo3 go when it doesn’t go go?
- What can we calculate from this knowledge?
– Average Battery Pack Voltage (V0+V1+V2+Vn)/n
– Estimated Available Power (Watt-Hours) in Battery Pack
(Time * Vaverage * Iestimate=0.275A for Idle Battery Draw with Pi3B)
– Estimated System Load at idle in watts (Vaverage * Iestimate=0.275A)
– Given a 9.6v 2000mAh battery pack, how long might a GoPiGo3 contemplate his navel?
(Use measured Vaverage, and Estimated system Load: Iestimate of 0.275A)
Definitions:
milliampere-hour (mAh): measure of battery capacity to store energy
equivalent to average milliAmperes times time
Watt (W): unit of instantaneous power, equivalent to volts times amperes
Watt-hour: unit of energy/power used over time
milliWatt-hour mWh: W-hr times 1000
Volt: unit of electrical force or charge
Ampere: unit of current or flow of electrons
Program to run to find out just how long a fully charged GoPiGo will “run” while meditating on the power of silence.
#!/usr/bin/python
#
# measureLife.py Controlled Battery Life Measurement
# Run Battery down while printing status every 10 seconds
#
# This test will loop reading the battery voltage
# UNTIL voltage stays below 7.4v 4 times,
# then will force a shutdown.
#
#
import sys
import time
import signal
import os
from datetime import datetime
import gopigo3
LOW_BATTERY_V = 7.4 # 8cells x 0.925v # safe value, could go to 0.9
# Return CPU temperature as a character string
def getCPUtemperature():
res = os.popen('vcgencmd measure_temp').readline()
return(res.replace("temp=","").replace("\n",""))
# Return Clock Freq as a character string
def getClockFreq():
res = os.popen('vcgencmd measure_clock arm').readline()
res = int(res.split("=")[1])
if (res < 1000000000):
res = str(res/1000000)+" MHz"
else: res = '{:.2f}'.format(res/1000000000.0)+" GHz"
return res
# Return throttled flags as a character string
def getThrottled():
res = os.popen('vcgencmd get_throttled').readline()
return res.replace("\n","")
def getUptime():
res = os.popen('uptime').readline()
return res.replace("\n","")
def printStatus():
global gpg
print "\n********* CARL Basic STATUS *****"
print datetime.now().date(), getUptime()
vBatt = gpg.get_voltage_battery() #battery.volts()
print "Battery Voltage: %0.2f" % vBatt
v5V = gpg.get_voltage_5v()
print "5v Supply: %0.2f" % v5V
print "Processor Temp: %s" % getCPUtemperature()
print "Clock Frequency: %s" % getClockFreq()
print "%s" % getThrottled()
# ######### CNTL-C #####
# Callback and setup to catch control-C and quit program
_funcToRun=None
def signal_handler(signal, frame):
print '\n** Control-C Detected'
if (_funcToRun != None):
_funcToRun()
sys.exit(0) # raise SystemExit exception
# Setup the callback to catch control-C
def set_cntl_c_handler(toRun=None):
global _funcToRun
_funcToRun = toRun
signal.signal(signal.SIGINT, signal_handler)
# ##### MAIN ######
def handle_ctlc():
global gpg
gpg.reset_all()
print "status.py: handle_ctlc() executed"
def main():
global gpg
# #### SET CNTL-C HANDLER
set_cntl_c_handler(handle_ctlc)
# #### Create instance of GoPiGo3 base class
gpg = gopigo3.GoPiGo3()
batteryLowCount = 0
#print ("Starting status loop at %.2f volts" % battery.volts())
try:
while True:
printStatus()
vBatt = gpg.get_voltage_battery()
if (vBatt < LOW_BATTERY_V):
batteryLowCount += 1
else: batteryLowCount = 0
if (batteryLowCount > 3):
print ("WARNING, WARNING, SHUTTING DOWN NOW")
print ("BATTERY %.2f volts BATTERY LOW - SHUTTING DOWN NOW" % vBatt)
gpg.reset_all()
time.sleep(1)
os.system("sudo shutdown -h now")
sys.exit(0)
time.sleep(10) # check battery status every 10 seconds
# important to check often to catch rapid drop at the end
#end while
except SystemExit:
print "status.py: exiting"
if __name__ == "__main__":
main()
Results from my run
- GoPiGo3, Raspberry Pi 3B,
- 8x NiMH AA cells with 2200 mAH rating
pi@Carl:~/Carl $ ./measureLife.py
********* CARL Basic STATUS *****
2018-08-28 11:43:51 up 0 min, 2 users, load average: 1.67, 0.50, 0.17
Battery Voltage: 10.56
5v Supply: 5.05
Processor Temp: 37.0'C
Clock Frequency: 1.20 GHz
throttled=0x0
... (Intermediate output removed for brevity) ...
********* CARL Basic STATUS *****
2018-08-28 18:43:13 up 7:00, 2 users, load average: 0.12, 0.03, 0.01
Battery Voltage: 8.22
5v Supply: 5.05
Processor Temp: 50.5'C
Clock Frequency: 600 MHz
throttled=0x0
********* CARL Basic STATUS *****
2018-08-28 19:02:52 up 7:19, 2 users, load average: 0.08, 0.03, 0.00
Battery Voltage: 7.32
5v Supply: 5.03
Processor Temp: 50.5'C
Clock Frequency: 600 MHz
throttled=0x0
BATTERY 7.28 volts BATTERY LOW - SHUTTING DOWN NOW
Connection to X.0.0.X closed by remote host.
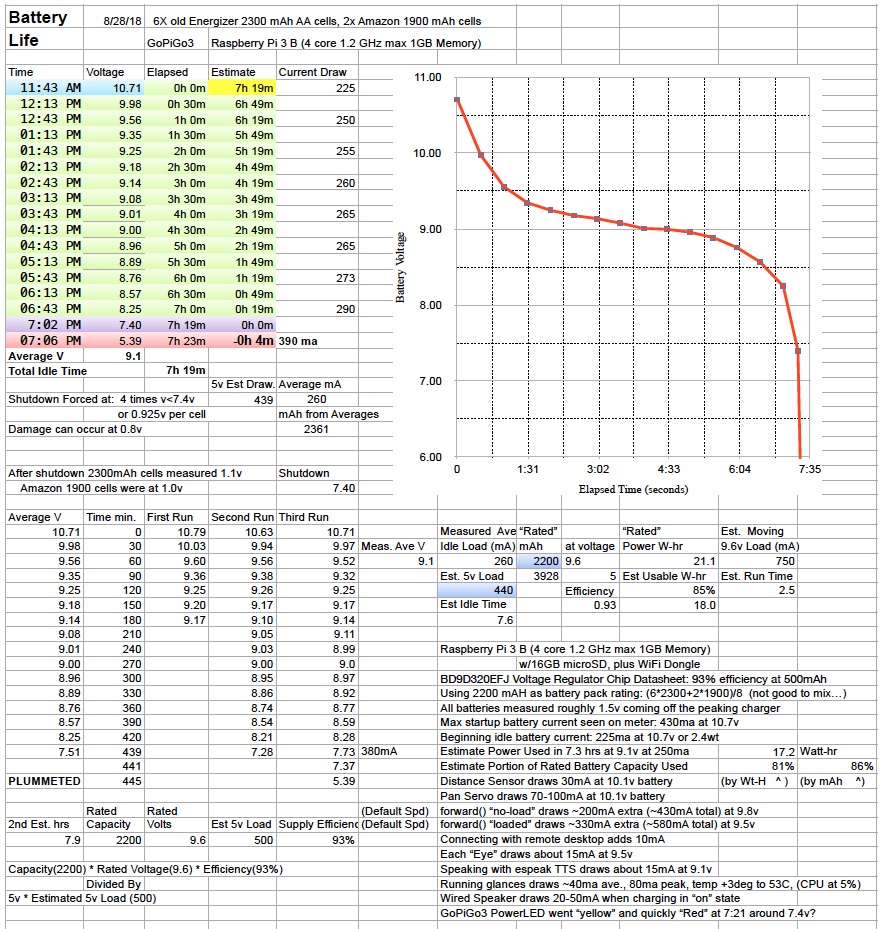
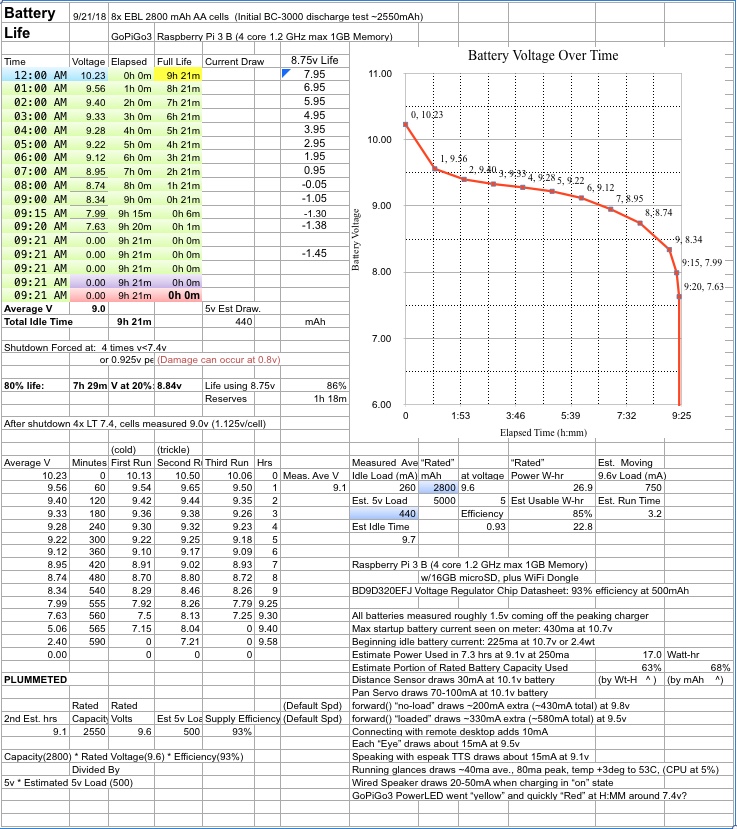
My Results:
- My original guess of 4 hours (2200mAh/500mAh) was based on very wrong understanding
- When Carl did not shutdown per first guess, I had to shut him down “early”
- On two subsequent tests, “Carl” sat quietly meditating in his corner for 7.3 hours
- Actual “Idle Battery Life” of 7.3hrs is within 8% of revised estimate of 7.9hrs
- Actual life is within 5% of post experiment estimate 7.6 hrs
- Max startup battery current seen on meter: 430ma at 10.7v
- Beginning idle battery current: 225ma at 10.7v or 2.4wt
- Estimated Power Used: 7.3 hrs at 9.1v ave. 260mA ave.: 17.2 Watt-Hours or 1898mAh
- Estimate Portion of Rated Battery Capacity Used 81-85%
- Distance Sensor draws 30mA at 10.1v battery
- Pan Servo draws 70-100mA at 10.1v battery
- forward() “no-load” draws ~200mA extra (~430mA total) at 9.8v
- forward() “loaded” draws ~330mA extra (~580mA total) at 9.5v
- Connecting with remote desktop adds 10mA
- Each “Eye” draws about 15mA at 9.5v
- Speaking with espeak TTS draws about 15mA at 9.1v
- Running glances draws ~40ma ave., 80ma peak, temp +3deg to 53C, (CPU at 5%)
- Wired speaker draws 20-50mA when charging in “on” state
- GoPiGo PowerLED went “yellow”, then quickly red at 7:21 around 7.4v?
- GoPiGo3 power circuit contains Schottky diode for reverse polarity protection
(perhaps 0.3v voltage drop?) and DMP3017SFG NMOS FET power switch (0.6v drop?)
between battery pack and the Voltage Regulator - GoPiGo3.get_battery_voltage() is reading 0.6v less than battery voltage measured
at the battery pack terminals
Experiment Notes