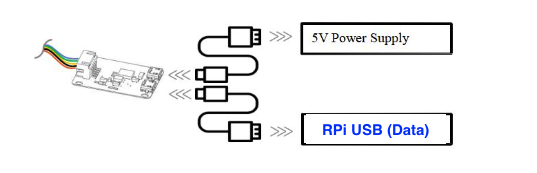
The manual for the X4 shows a power cable and a data cable:
I always wondered how the book’s author powered the LIDAR.
There are three possible ways to power it:
Use a Pi4 which can supply 1.2A (across all USB devices) - may only need one cable for data+power, otherwise both cables are plugged into RPi4 USB ports.
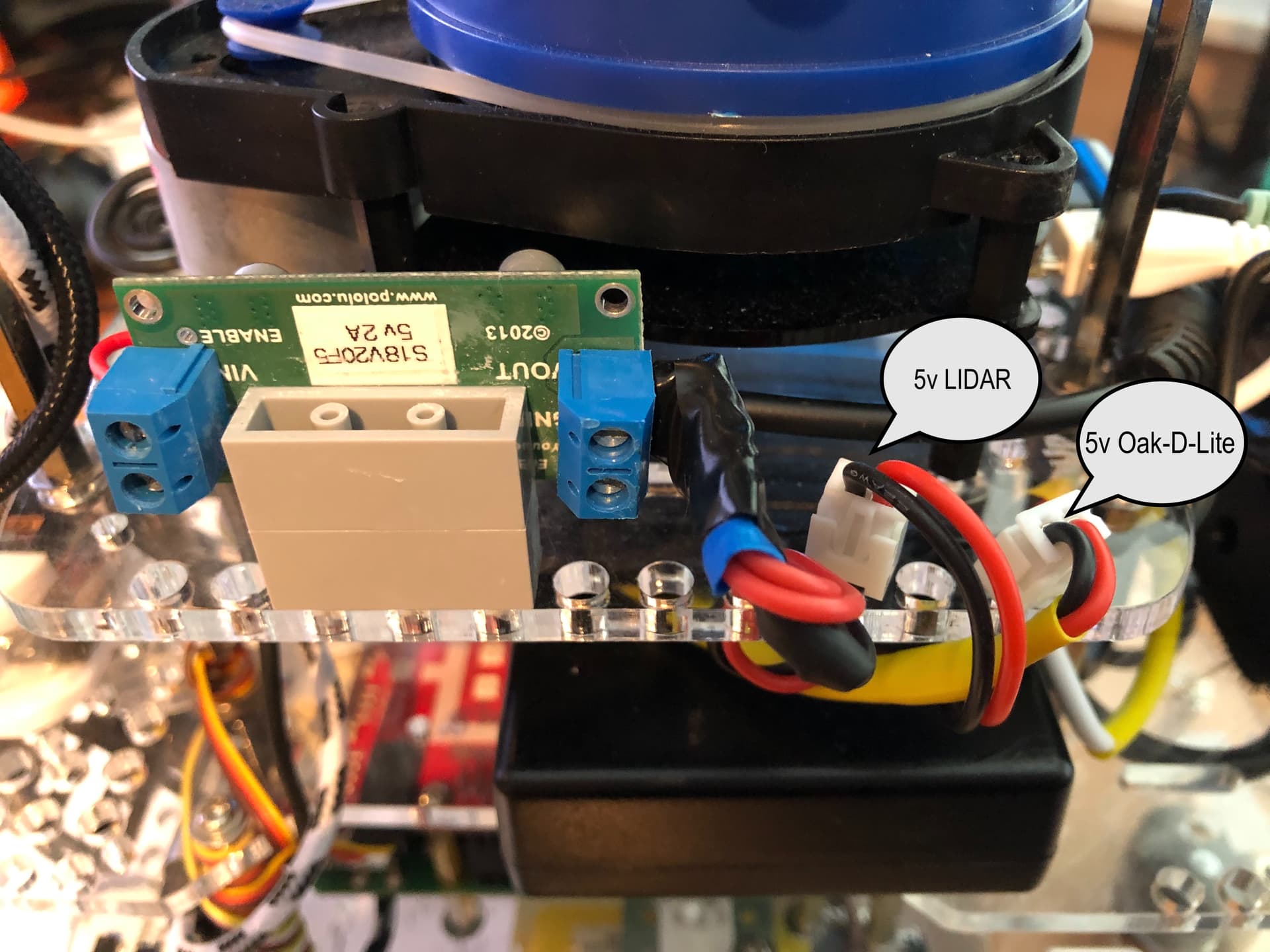
I added a Pololu 5V 2A step-down power supply board, powered from the battery in parallel with the GoPiGo3 red board
NOTE:
The GoPiGo3 red board can supply only 2.5A to the Pi4, and my Pi4 doing everything ROS, and moving slowly, burns 7-7.5W which leaves about 1A for the USB/LIDAR. When the YDLIDAR X4 starts up it draws a max of 480mA according to the spec sheet. I found that even with my separate supply, I need to delay starting the YDLIDAR for 10 seconds until the GoPiGo3 node is fully running to avoid a (temporary) low voltage throttle event. (I have never diagnosed how this could be, but it happened early on and I found the delay did the trick.)
Likewise, I wouldn’t use the GoPiGo3 servo(s) while the LIDAR is running.
So, it looks like you tapped new holes on the smaller Dexter polycarbonate plate, yes? Also, what is that beige brick - looks like an upside down pair of Leggo bricks! Is that just to keep the Pololu board from falling off?
@KeithW BTW, how stable was the USB power supply from the TalentCell model YB1203000-USB. I ask because the manual for the YDLIDAR X4 states:
It is not recommended for use mobile phone power bank because the voltage ripple of power bank is too large.
The TalentCell may have better control over the voltage output compared to a " mobile phone power bank" and I am not sure how “too much” voltage ripple would manifest itself either but I thought I would ask.
Same question for anyone else on the forum that has gone this route to power a LIDAR!
Yes but I wish I had created a “mounting plate” that used existing platform holes and used flat head screws or recessed screw heads for the LIDAR mounting pattern. Drilling plexiglass without a drill press was nerve wracking. It is so easy to crack the platform. I succeeded but I consider it lucky.
Yes, I bought a small pack of Lego bricks. The holes in the GoPiGo3 platform are sized and spaced to mate with Lego blocks. To mount the powersupply board, I super-glued two Lego bricks together and superglued the board to the bricks. This makes the board removable for future cabling reconfigurations.
I was wondering how the Slamtech RPLIDAR C1 would be, but it has not seemed to get traction in the ROS community that I expected for a single cable $99 device.