The beta GoPiGo OS / DexterOS has TensorFlowLite and OpenCV installed by default.
(I don’t have the R4R Oct 17 image on a card anymore - so can’t look for myself - sorry.)
The beta GoPiGo OS / DexterOS has TensorFlowLite and OpenCV installed by default.
(I don’t have the R4R Oct 17 image on a card anymore - so can’t look for myself - sorry.)
Probably not. Raspbian for Robots lets you install whatever you want. And having those libraries in makes the image so much bigger
Trying again without running the IMU this time. Carl will test just hardware I2C.
If Carl survives for a week or two, I’ll add an IMU reliability test.
Now we’re talkin’ fun!
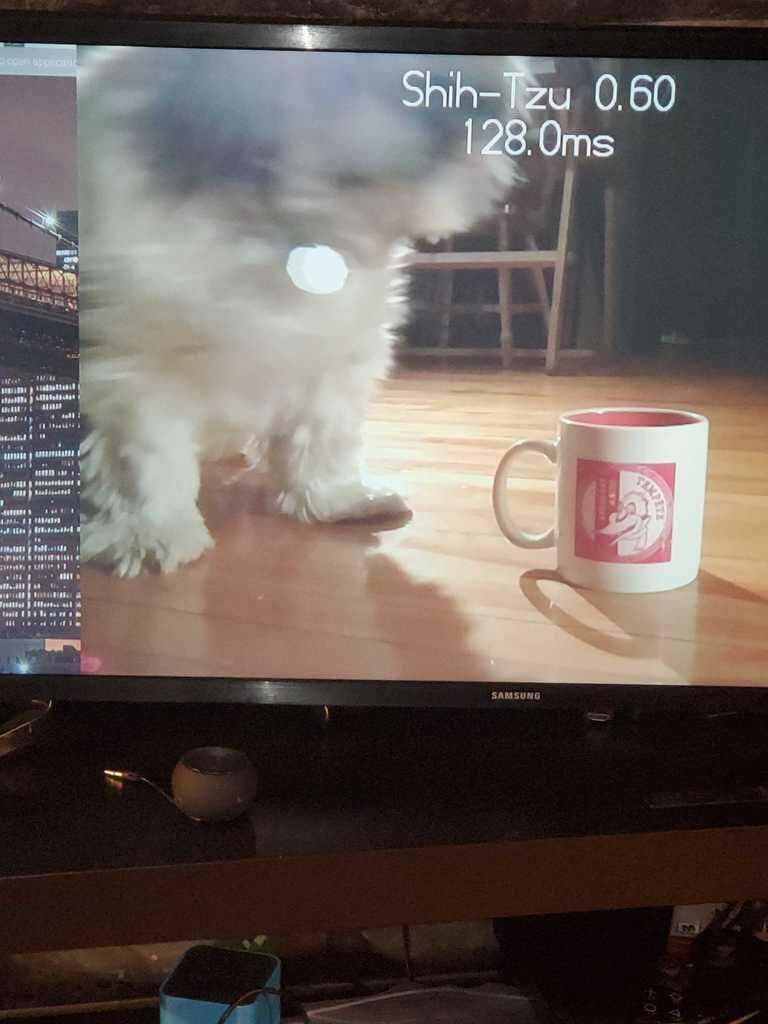
Installed the TensorFlowLite image classification example and modified it to print to the command-line if an object classification probability is greater than 60%. It successfully classified a clock that I held about 6 inches from Carl’s face…but then it also thought it saw some items not likely to be in my home!
pi@Carl:~/Carl/Examples/TF/examples/lite/examples/image_classification/raspberry_pi $ ./run_it.sh
analog clock 0.71 310.1ms
analog clock 0.60 309.5ms
analog clock 0.62 309.8ms
sliding door 0.60 337.7ms
sliding door 0.61 312.8ms
sliding door 0.66 311.9ms
sliding door 0.69 312.2ms
sliding door 0.62 312.3ms
sliding door 0.74 309.8ms
sliding door 0.67 309.7ms
sliding door 0.70 309.8ms
sliding door 0.66 309.7ms
turnstile 0.69 309.9ms
turnstile 0.79 309.8ms
^C
Exiting
Carl was getting low on juice and the TFLite program ran the battery down pretty quick as he exclaimed “Turning around to Docking Approach Point”.
Have to test more when he gets juiced up.
Liking the new ‘toy’ ? 
In GoPiGo OS, I have modified the same script to print to console too. And by experience, you need to handle a confidence level of at least 85% to avoid the non existing sliding door. It did manage to identify my Shih Tzu as an actual Shih Tzu too
Be sure to look at my version on git, it has all the options plus a save annotated image to file
HW and SW I2C “banging” continues - good news so far:
PiOS based Raspbian For Robots 17 Oct 2020 beta release
No Change to DI_Sensors from 17Feb2019 version
Test1: Regular Operation on beta OS release
Test2: Regular Operation w/o using SW I2C/IMU on beta OS
Test3: Add HW I2C stress on Distance Sensor
Test4: Add SW I2C Stress
19:17:17 1103111
Magnetometer X: -34.5 Y: -22.9 Z: -10.2 Gyroscope X: 0.2 Y: -0.1 Z: 0.1 Accelerometer X: 0.1 Y: 0.2 Z: 9.5 Euler Heading: 348.1 Roll: 0.4 Pitch: 0.8
19:17:19 1103121
Magnetometer X: -34.1 Y: -22.6 Z: -10.6 Gyroscope X: 0.1 Y: -0.1 Z: 0.0 Accelerometer X: 0.1 Y: 0.1 Z: 9.4 Euler Heading: 348.1 Roll: 0.4 Pitch: 0.8
Test5: Heavy HW and SW I2C Stress
=====
temp=54.8'C
19:50:42 up 7 days, 5:27, 5 users, load average: 0.66, 0.78, 0.74
19:49:46 9261:distance from object: 604 mm
19:49:49 9271:distance from object: 615 mm
19:49:52 9281:distance from object: 613 mm
19:49:55 9291:distance from object: 612 mm
19:49:57 9301:distance from object: 611 mm
19:50:00 9311:distance from object: 611 mm
19:50:03 9321:distance from object: 614 mm
19:50:06 9331:distance from object: 602 mm
19:50:09 9341:distance from object: 618 mm
19:50:11 9351:distance from object: 605 mm
======
19:50:26 9341
Magnetometer X: -33.1 Y: -23.4 Z: -6.6 Gyroscope X: -0.1 Y: -0.1 Z: -0.1 Accelerometer X: 0.1 Y: 0.6 Z: 9.4 Euler Heading: 345.2 Roll: 0.4 Pitch: 3.8
19:50:28 9351
Magnetometer X: -34.1 Y: -24.6 Z: -6.2 Gyroscope X: 0.1 Y: 0.0 Z: -0.1 Accelerometer X: 0.1 Y: 0.6 Z: 9.4 Euler Heading: 345.2 Roll: 0.4 Pitch: 3.8
19:50:31 9361
Magnetometer X: -34.1 Y: -25.0 Z: -1.1 Gyroscope X: -0.1 Y: 0.0 Z: 0.1 Accelerometer X: 0.1 Y: 0.7 Z: 9.4 Euler Heading: 345.2 Roll: 0.4 Pitch: 3.8
19:50:33 9371
Magnetometer X: -33.8 Y: -26.2 Z: -1.1 Gyroscope X: -0.1 Y: -0.1 Z: -0.1 Accelerometer X: 0.1 Y: 0.7 Z: 9.4 Euler Heading: 345.2 Roll: 0.4 Pitch: 3.8
19:50:36 9381
Magnetometer X: -33.8 Y: -25.8 Z: -0.8 Gyroscope X: -0.1 Y: -0.1 Z: -0.1 Accelerometer X: 0.1 Y: 0.6 Z: 9.4 Euler Heading: 345.2 Roll: 0.4 Pitch: 3.8
=====
1
IMU (SW I2C) Exceptions
So, the conclusions from all this are?
HW and SW I2C “banging” continues - very good results so far but no conclusions yet.
The original testing was performed on the exact R4R Oct 17 image.
Current testing is being performed on
sudo apt-get update -y
sudo apt-get full-upgrade -y
One final test remains in plan - to restore the automatic imu logging which uses my “safe” IMU class.
Carl has run very smoothly 24/7 for eight days on this image, at higher processor loads than his usual. He seems quite “happy” so far.
Thank you!
Though I might be fairly clever, I have not yet reached the pitch of intelligence where I can look at a blob of numbers as raw data and understand what they’re trying to tell me.
Though I have not yet accomplished what you do, your work fascinates me. It’s intriguing. I really enjoy watching the way you carefully and precisely chop up the Dexter/MR designs into tiny pieces and then reassemble them into something that works.
What you’ve discovered is ultimately destined to save me, and others, much time and angst.
Again,
Thank you!
I’m with @jimrh - thanks for your thorough testing. I’m still very, very new on the platform, so this is quite helpful.
/K
Control_Panel - Works Fully
easy_Blinkers.py Works Fully
easy_DexEyes.py Works Fully
easy_Distance_Sensor.py Works Fully
easy_Motors.py Works Fully
LED.py Works Fully
Motor_Encoder.py Works Fully
Motor_Position.py Works Fully
Motor.py
Motor_Speed.py -
Motor_Turn.py Works Fully
Read_Info.py Works Fully
Servo.py Works Fully
easy_Button.py
easy_Buzzer.py
easy_LED.py
easy_Light_Sensor.py
gps_reading.py
Grove_Buzzer.py
Grove_I2C.py
Grove_IR.py
Grove_LED.py
Grove_Light_Sensor.py
Grove.py
Grove_US2.py
Grove_US.py
Line_Sensor.py
Motor_Follow.py
Remote_Control.py
Disclaimers - YMMV:
There is this setting checked:
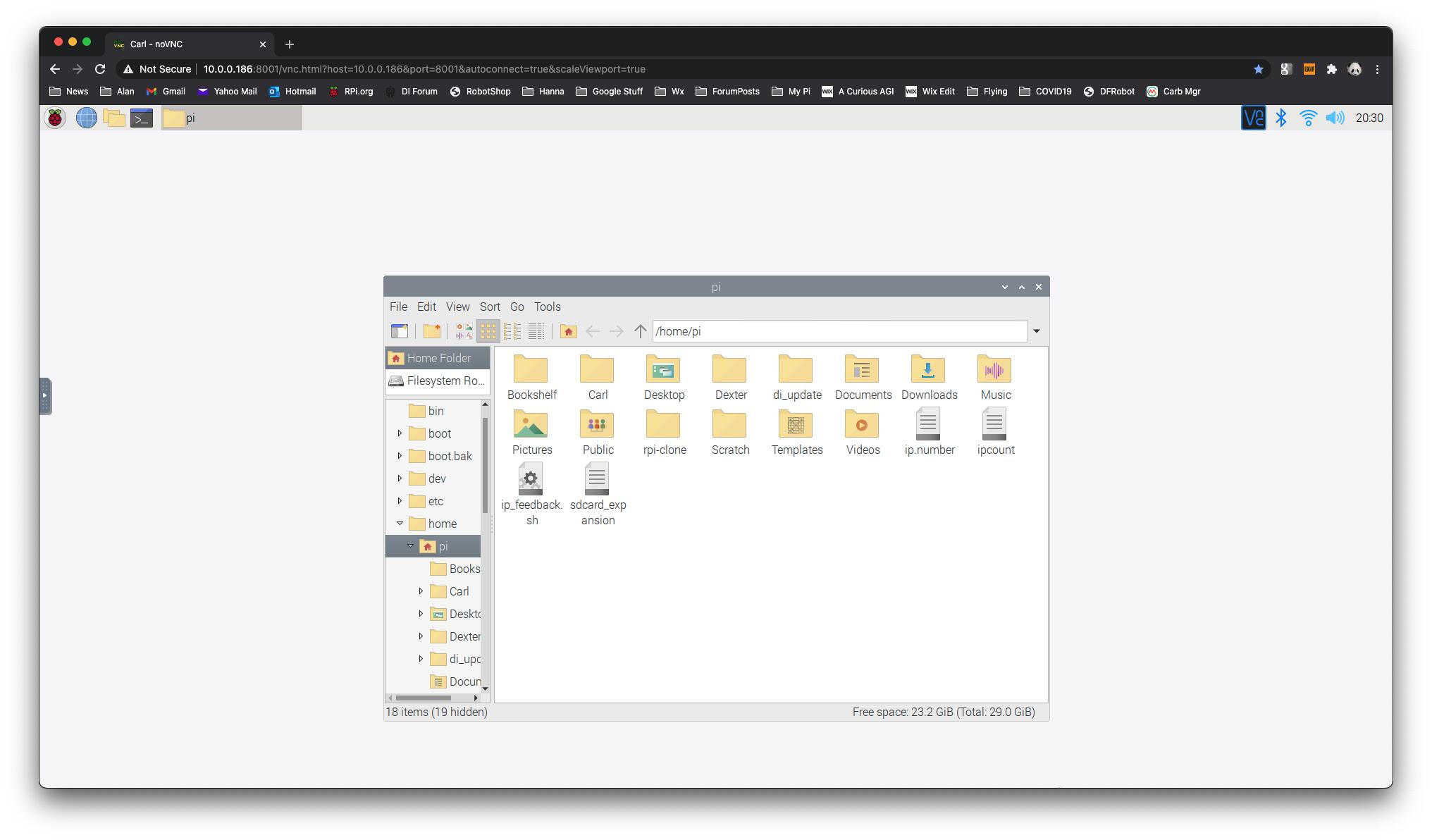
Today, I also lost the desktop. When I connect through noVNC or through remote desktop, I get to a ModRobotics desktop without the desktop widgets.
Work around is to open desktop folder, or LogOut and Log back in.
(Does not happen if Logout then Disconnect Session, Then Reconnect and Login)
For the last several days, I have been fighting to get RPI-Monitor to properly start at boot on both Carl, and my “DeskPi.”
Carl is running R4R over PiOS, while the DeskPi is running PiOS. Carl was seeing:
Web server not started because of error: Address already in use
I found that starting the RPI-Monitor with Carl’s reserved IP prevents the error to allow this useful tool to work.
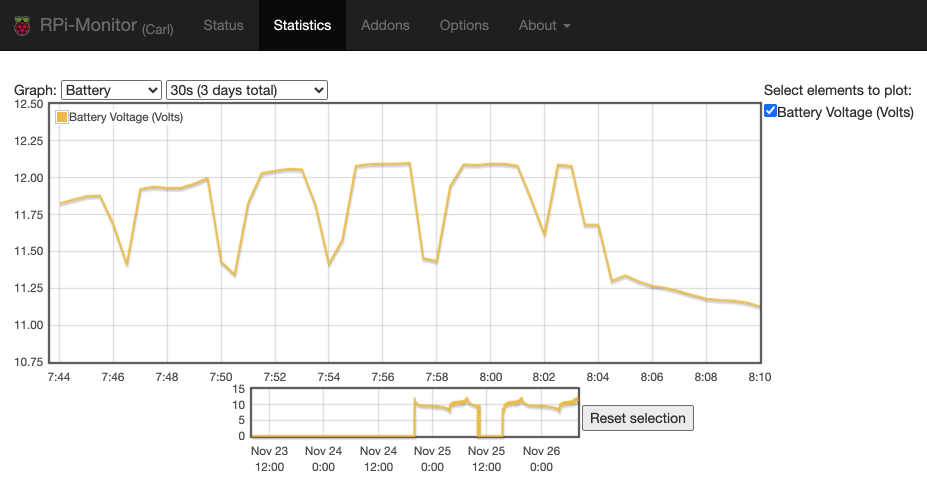
Recently, I changed Carl’s recharger which lowered his maximum recharge rate from 1A to 0.9A. Carl was getting off his dock before the trickle charge light came on due to “Rule 230c - Probable Trickle Not Detected after 3.5 hour charging”, so I changed the time for that rule to 4.0 hours to provide a little more time.
Today is the first day I have RPI-Monitor running that I can conveniently review the recharge voltage curve, and as I was doing so Carl announced “Trickle Charging - Dismounting”. I quickly looked at the charger to see the status LED showing solid green which means Carl was indeed trickle charging.
Looking through his recharging log showed it still was due to rule 230c - Probable Trickling Not Detected (after 4 hrs), but reviewing the RPI-Monitor shows that the charger had indeed not long before switched to trickle charging - Carl is so smart!
(I would have preferred to see that Carl detected the trickle charge when the average voltage started going down instead of up, but the important thing is to get off the dock when the charger is trickling.)
Who would believe the happiness playing with Carl can give? I’ve been up for two hours and still haven’t prepared my breakfast.
Update: The next morning Carl recognized trickle at 3.8 hours on the dock (rule 230: over 12v and mean voltage has negative slope), before the 4 hour “probable trickle” rule 230c could fire!
Any idea what causes this in general? What must be done to (generally) avoid this error in the future?
IOW: Given a user who has never used this before, what must be changed in either the code or it’s documentation to prevent this from occurring?
I suspect that RPI-Monitor is trying to launch a web server on 127.0.0.1 which the R4R apache2 server has claimed:
pi@Carl:~/Carl $ ps -ef | grep apache
root 753 1 0 Nov25 ? 00:00:06 /usr/sbin/apache2 -k start
www-data 17069 753 0 00:00 ? 00:00:00 /usr/sbin/apache2 -k start
www-data 17070 753 0 00:00 ? 00:00:00 /usr/sbin/apache2 -k start
www-data 17072 753 0 00:00 ? 00:00:00 /usr/sbin/apache2 -k start
www-data 17073 753 0 00:00 ? 00:00:00 /usr/sbin/apache2 -k start
www-data 17074 753 0 00:00 ? 00:00:00 /usr/sbin/apache2 -k start
pi 21655 1483 0 10:27 pts/0 00:00:00 grep --color=auto apache
pi@Carl:~/Carl $ sudo systemctl status rpimonitor
● rpimonitor.service - RPi-Monitor daemon
Loaded: loaded (/etc/systemd/system/rpimonitor.service; enabled; vendor preset: enabled)
Active: active (running) since Wed 2020-11-25 15:46:13 EST; 18h ago
Main PID: 20282 (rpimonitord)
Tasks: 5 (limit: 1939)
CGroup: /system.slice/rpimonitor.service
├─20282 /usr/bin/perl /usr/bin/rpimonitord -a 10.0.0.186
├─20291 /usr/bin/perl /usr/bin/rpimonitord -a 10.0.0.186
├─20292 /usr/bin/perl /usr/bin/rpimonitord -a 10.0.0.186
├─21683 sh -c /home/pi/Carl/plib/getChargingStateStr.py 2>/dev/null
└─21684 python3 /home/pi/Carl/plib/getChargingStateStr.py
Nov 25 15:46:13 Carl systemd[1]: Started RPi-Monitor daemon.
pi@Carl:~/Carl $ sudo systemctl status apache2
● apache2.service - The Apache HTTP Server
Loaded: loaded (/lib/systemd/system/apache2.service; enabled; vendor preset: enabled)
Active: active (running) since Wed 2020-11-25 10:18:27 EST; 1 day 4h ago
Docs: https://httpd.apache.org/docs/2.4/
Process: 17057 ExecReload=/usr/sbin/apachectl graceful (code=exited, status=0/SUCCESS)
Main PID: 753 (apache2)
Tasks: 11 (limit: 1939)
CGroup: /system.slice/apache2.service
├─ 753 /usr/sbin/apache2 -k start
├─ 1884 /usr/sbin/apache2 -k start
├─ 1892 /usr/sbin/apache2 -k start
├─ 1893 /usr/sbin/apache2 -k start
├─ 1894 /usr/sbin/apache2 -k start
├─ 1898 /usr/sbin/apache2 -k start
├─17069 /usr/sbin/apache2 -k start
├─17070 /usr/sbin/apache2 -k start
├─17072 /usr/sbin/apache2 -k start
├─17073 /usr/sbin/apache2 -k start
└─17074 /usr/sbin/apache2 -k start
Nov 25 10:18:22 Carl systemd[1]: Starting The Apache HTTP Server...
Nov 25 10:18:26 Carl apachectl[515]: AH00558: apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1. Set the 'ServerName' dir
Nov 25 10:18:27 Carl systemd[1]: Started The Apache HTTP Server.
Nov 26 00:00:55 Carl systemd[1]: Reloading The Apache HTTP Server.
Nov 26 00:00:55 Carl apachectl[17057]: AH00558: apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1. Set the 'ServerName' d
Nov 26 00:00:55 Carl systemd[1]: Reloaded The Apache HTTP Server.
thus the success of instructing the RPI-Monitor to use the reserved DHCP address I assigned to Carl’s on-board WiFi instead of the 127.0.0.1 localhost commonly used as a default server address.
This is the pertinent installation change that I made to make it work:
RPi-Monitor for GoPiGo3 Carl
* Documentation:
https://xavierberger.github.io/RPi-Monitor-docs/11_installation.html
https://xavierberger.github.io/RPi-Monitor-docs/index.html
* Installation (first two added for "site refused to connect")
sudo apt-get install libregexp-common-perl
sudo apt-get install liburi-perl
sudo apt-get install dirmngr
sudo apt-key adv --recv-keys --keyserver keyserver.ubuntu.com 2C0D3C0F
sudo wget http://goo.gl/vewCLL -O /etc/apt/sources.list.d/rpimonitor.list
sudo apt-get update
sudo apt-get install rpimonitor
==== Nov 2020 PiOS R4R install ====
something weird at boot
Runs just fine when run:
ps -ef | grep rpi
(kill off all rpimonitor - rpimonitord + three perl jobs)
sudo rpimonitord -a 10.0.0.186 -l /var/log/rpimonitord.log &
pkg install of rpimonitor places /etc/init.d/rpimonitor which is the "old" method of starting services. The "new" method is to create /etc/systemd/system/rpimonitor.service , and enable it.
(see https://github.com/XavierBerger/RPi-Monitor/issues/302)
For some reason I have to set the address to 10.0.0.186 or it gets
Web server not started because of error: Address already in use
sudo nano /etc/systemd/system/rpimonitor.service
# #####
[Unit]
Description=RPi-Monitor daemon
Before=multi-user.target
After=remote-fs.target
After=network-online.target
Wants=network-online.target
[Service]
Type=simple
Restart=on-failure
KillMode=mixed
Nice=19
ExecStart=/usr/bin/rpimonitord -a 10.0.0.186
ExecStop=/bin/kill $MAINPID
StandardOutput=append:/var/log/rpimonitor.log
StandardError=append:/var/log/rpimonitor.log
[Install]
WantedBy=multi-user.target
# ######
then
sudo systemctl daemon-reload
sudo systemctl enable rpimonitor
sudo systemctl start rpimonitor
(reboot to confirm startup at boot)
That gets the RPI-Monitor up showing processor load and temperature, disk and memory statistics.
Getting the RPI-Monitor to track and display Carl’s battery voltage is a complex configuration of somewhat Carl specific configuration that could easily be generalized for any GoPiGo bot.
If you decide to try installing RPI-Monitor, let me know when it is up and running. I’ll create an “any GoPiGo3 config” for you.
Thanks!
I don’t think that will be necessary any time soon, there are enough web servers running on Charlie right now, just with the VNC server and the Remote Camera Robot stuff.
However, it is interesting to see you analysis of the problem and your suspicion that it wanted to appropriate localhost. (And why do you have an Apache instance running anyway?  )
)
Raspbian For Robots (PiOS version) uses apache2 to serve up the R4R landing page:
/var/www/html/index_buster.php
<title>Dexter Industries Raspbian for Robots</title>
...
<section>
<p>
Welcome to Raspbian for Robots, our custom software for your Dexter Industries robots! There are two ways to view and program your robot.
</p>
<p>
The easiest and most user friendly way for beginners is to go in through VNC (virtual network connections), which will show you a little desktop in your browser wi
th icons and folders.
</p>
<p>
If you are more advanced and want to work in the command line, choose Terminal and have fun!
</p>
</section>
And also interesting the apache error log:
pi@Carl:~/Carl $ sudo more /var/log/apache2/error.log
[Thu Nov 26 00:00:56.003163 2020] [mpm_prefork:notice] [pid 753] AH00163: Apache/2.4.38 (Raspbian) configured -- resuming normal operations
[Thu Nov 26 00:00:56.003303 2020] [core:notice] [pid 753] AH00094: Command line: '/usr/sbin/apache2'
[Thu Nov 26 14:03:13.900447 2020] [php7:notice] [pid 17069] [client 10.0.0.129:50219] PHP Notice: Undefined offset: 0 in /var/www/html/index.php on line 4
[Thu Nov 26 14:03:13.930312 2020] [php7:notice] [pid 17069] [client 10.0.0.129:50219] PHP Notice: Undefined variable: ips in /var/www/html/index.php on line 76
[Thu Nov 26 14:03:13.930438 2020] [php7:warn] [pid 17069] [client 10.0.0.129:50219] PHP Warning: Invalid argument supplied for foreach() in /var/www/html/index.php on
line 76