It might not be reasonable, but if we wanted to be reasonable we wouldn’t be doing hobby robotics . A lot of what we do isn’t very reasonable, except for the reason that we enjoy it (heck, I just saw a small video of a golfer on Twitter. People earn millions hitting a small white ball with a stick until it goes into a hole - talk about ridiculous ).
If runtime and reducing power consumption are your primary criteria, then why aren’t you using a Zero-W?
If there’s one thing that I despise down to the roots of my soul, it’s religious wars.
I had enough of that with the Atari vs Commodore, Atari 8-bit vs Atari 16-bit, PC vs Mac, Intel vs AMD, Windows vs Linux, distribution vs distribution and now, which Raspberry Pi is the best one for a 'bot?
NO, a thousand times no!
This is the kind of senseless infighting that has driven me away from groups and platforms in the past.
I may disagree with the choices you, Keith, (or anyone else for that matter), decide to do with your bots; but the real bottom line is that it’s YOUR bot. My opinion doesn’t count. What counts is what YOU might want to do with it.
If someone comes onto this group wanting to mount a Jetson Nano or Xavier1 on a GoPiGo chassis, more power to him! I’m not going to chase him away just because he’s not using a Pi-3.
And aren’t you the one who wrote that the PRIMARY goal for all this was to have fun?
So, where did the fun go, and why do you even care which Pi someone puts on their 'bot?
(1) There’s now a Jetson Xavier board that’s pin-compatible with the Jetson Nano and runs on the Nano’s dev board.
He seems to be in Hog Heaven with this board. I’m tempted to try one too, but maybe not on a GoPiGo - I’d need a car’s battery to run it. Or maybe the battery from a Harley? I’d need the rest of the Harley to carry the beast too!
I have four Rpi 4Bs, a Xavier NX and numerous Nanos.
Yes, the Xavier NX is somewhat power hungry, though it can be powered all the way from 9 to 20 volts dc so a pair of big 3S Lipos will work fine.
As I have stated in the past, the GoPiGo3 is fun for software experimenting, but way too small to be of practical use.
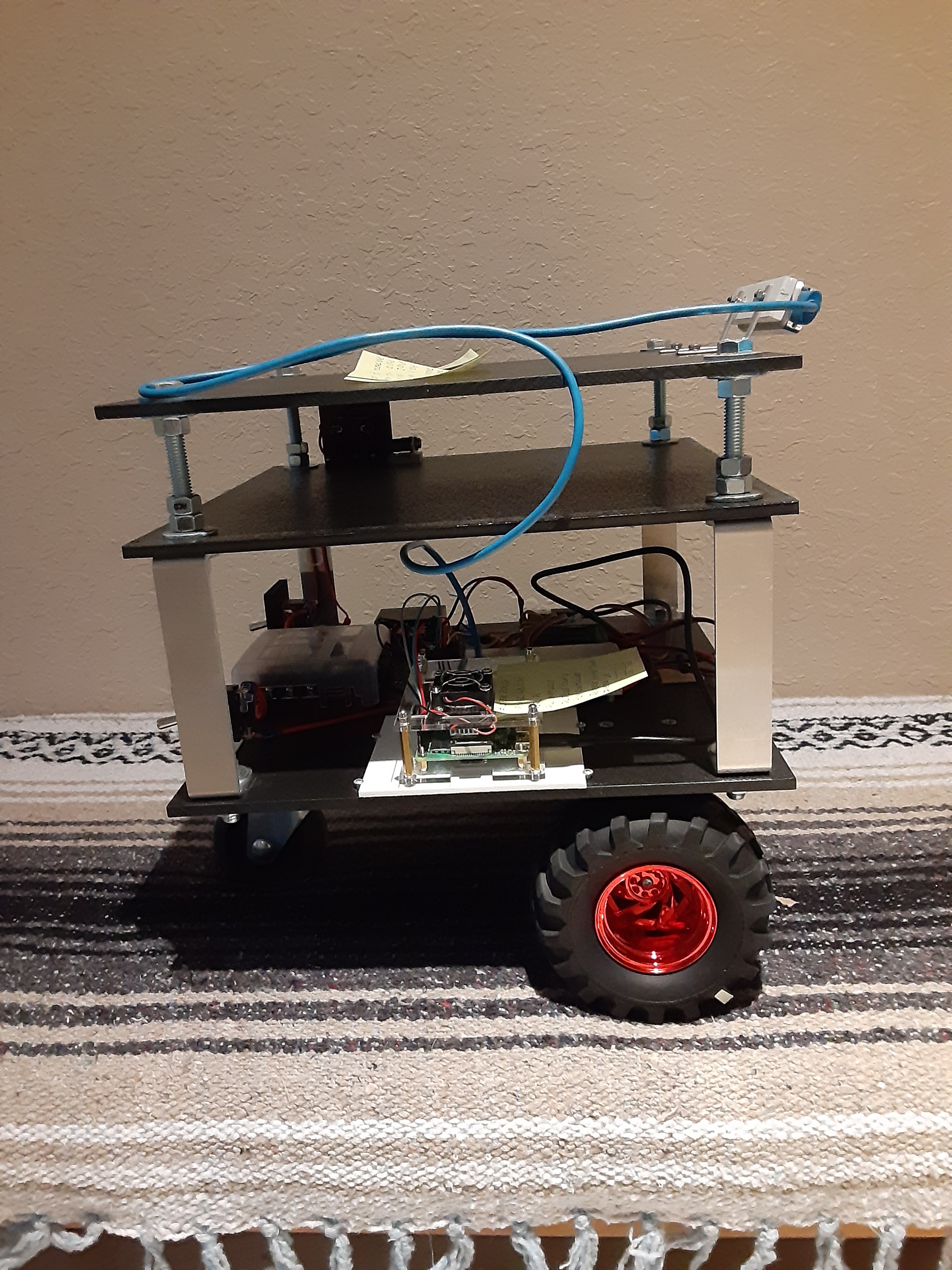
I have completed the assembly and testing of a ServoCity Prowler that runs Donkey Car software (v4.1.0) on a Nano with a Sainsmart 160 deg camera that has been trained to patrol the perimeter of my property.
I also have a very large version of the GoPiGo3 that runs a special version of Donkey Car software on a Rpi 4B 4GB that uses an Intel T265 tracking camera to navigate a pre-driven course. I call it YODO (You Only Drive Once) because you only drive the course once and then it will autonomously drive the course by itself.
One of the hot configurations right now is either a Nano or an Xavier NX and an Intel D435i depth sensing camera complete with an IMU running Donkey Car. An experimenter in Australia has this setup working on 1/8 scale R/C chassis and it is amazing to see it run a path once it has been trained.
This is the ServoCity Prowler while under construction. It is running a Nano 4GB (in the black box) and a Sainsmart 160 deg FOV camera and Donkey Car v4.1.0 software.
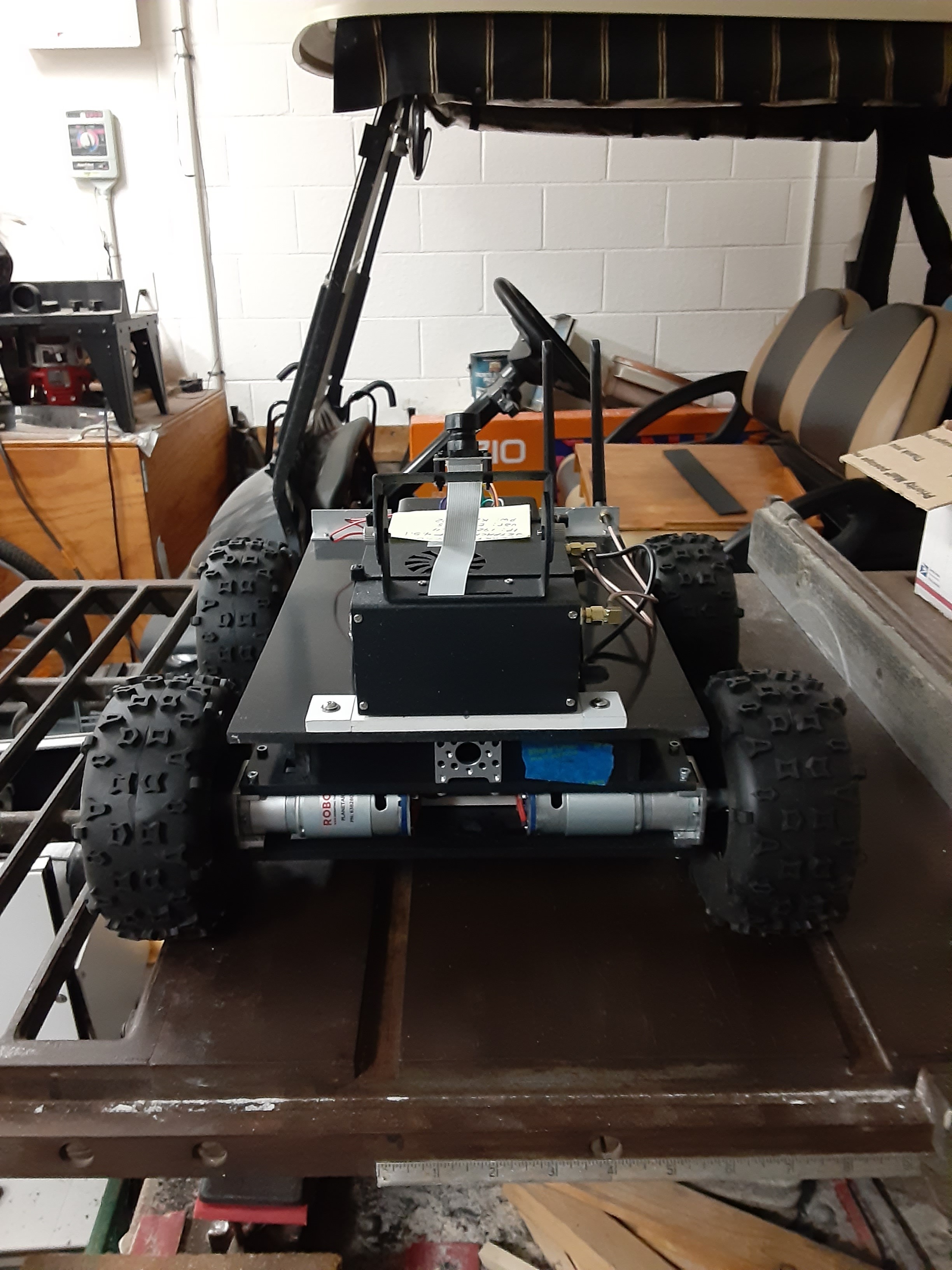
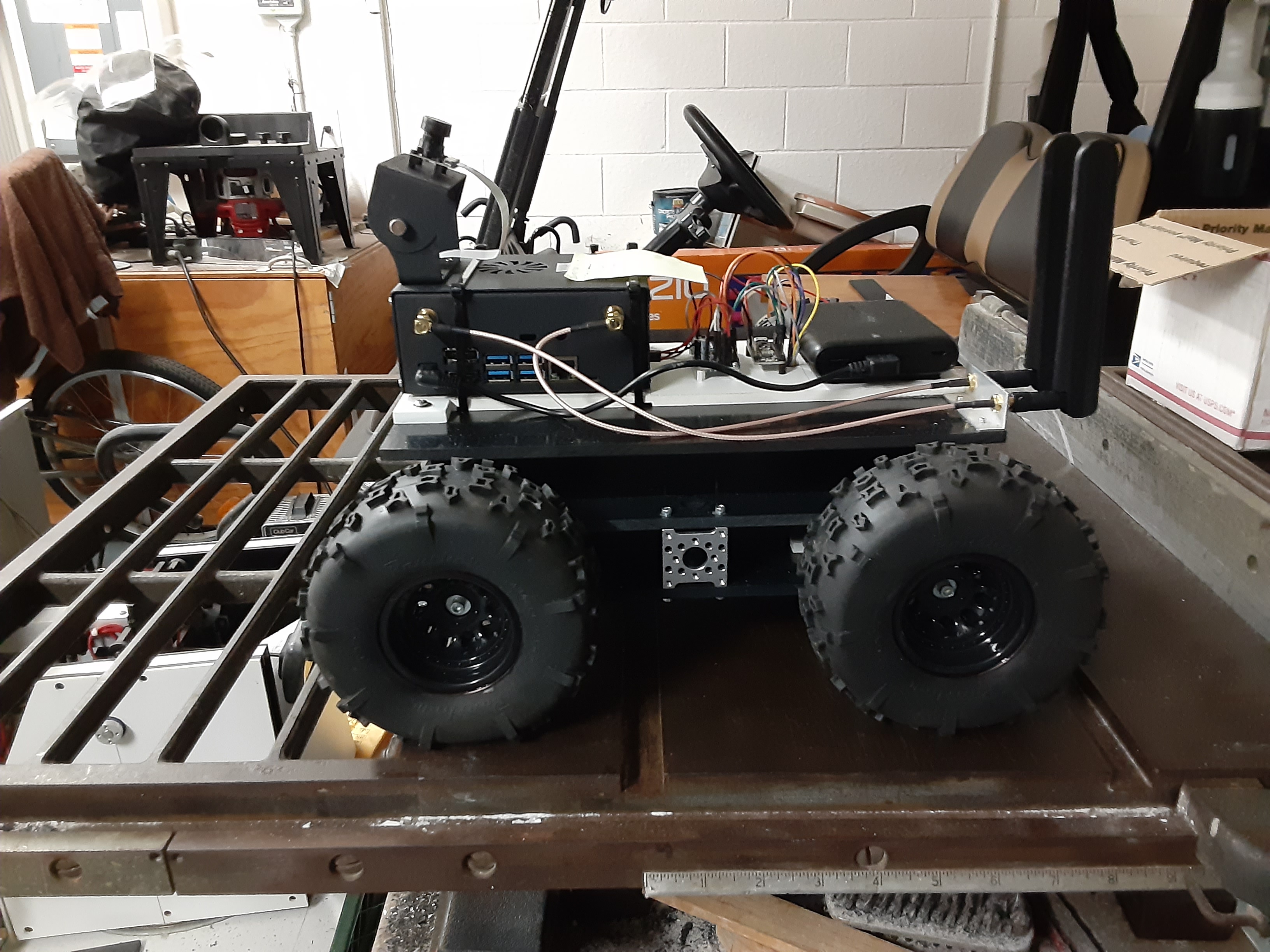
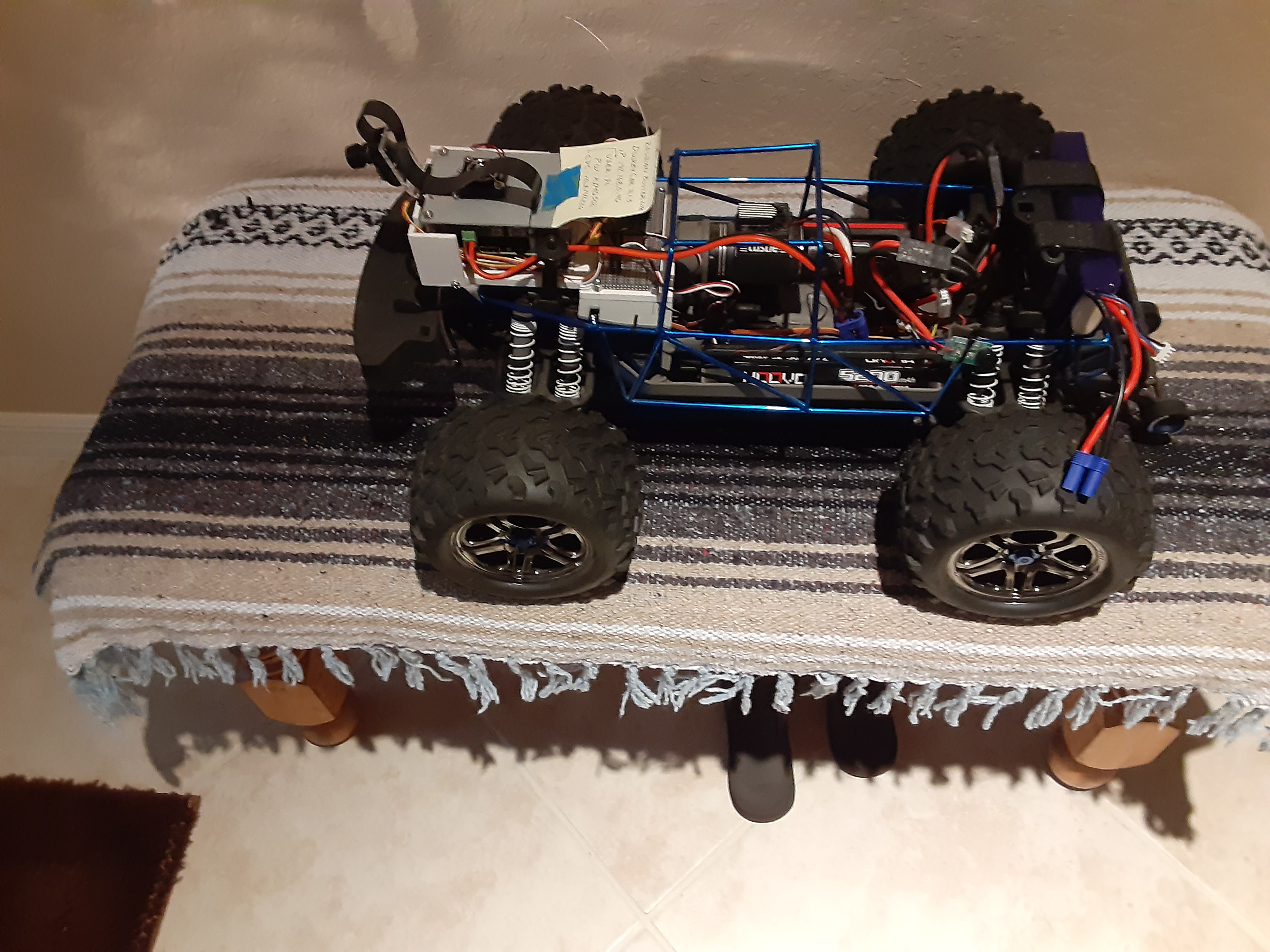
This is a Traxxas 4WD E-Maxx running a Rpi 3B+ and a Robotic Masters Robo HAT MM1 M4 that allows me to drive the E-Maxx with an R/C transmitter for data collection. This one is running Donkey Car v3.1.5.
The Big GoPiGo3 is powered with two 5000 mahr 3S Lipos in parallel that provide power for both the 12 vdc motors/controller and the Rpi 4B through a 5 vdc buck switching regulator.
The ServoCity Prowler has two 3000 mahr NiMH batteries in parallel that provide power for the four 12 vdc motors/controllers and an Anker 13,000 mahr 5 vdc battery pack that powers the NVIDIA Nano.
The Traxxas 4WD E-Maxx has two 5000 mahr 2S Lipo batteries in series that provide power to the motor ESC and steering servos and a 3S 5000 mah Lipo battery powers the Robo HAT MM1 M4 that provide 5 vdc to the attached Rpi 3B+.
When Alan decides to come back, I don’t want him to think we’re deliberately tweeking his beak and - let’s be honest - we’ve kind-of hijacked his thread.
So I decided to create a NEW thread that we can migrate this discussion to:
What say we wander these discussions of monster 'bots over to the new thread, 'eh?
That is because there isn’t one. The Rpi 4B 4GB is running a modified version of Donkey Car 4.1.0, using an Intel T265 tracking camera for path following, and communicates with a PCA9685 servo driver module that provides steering and throttle PWM signals to a Dimension Engineering Sabertooth 2X10 RC motor controller operating in the differential drive mode. The two 12 vdc motors do not have encoder feedback.
 . A lot of what we do isn’t very reasonable, except for the reason that we enjoy it (heck, I just saw a small video of a golfer on Twitter. People earn millions hitting a small white ball with a stick until it goes into a hole - talk about ridiculous
. A lot of what we do isn’t very reasonable, except for the reason that we enjoy it (heck, I just saw a small video of a golfer on Twitter. People earn millions hitting a small white ball with a stick until it goes into a hole - talk about ridiculous  ).
). .
.