Are you absolutely SURE this isn’t a Ph.D. dissertation project? 
Oh, and while you’re at it, add voice control to cook breakfast and fetch you a cold beer!
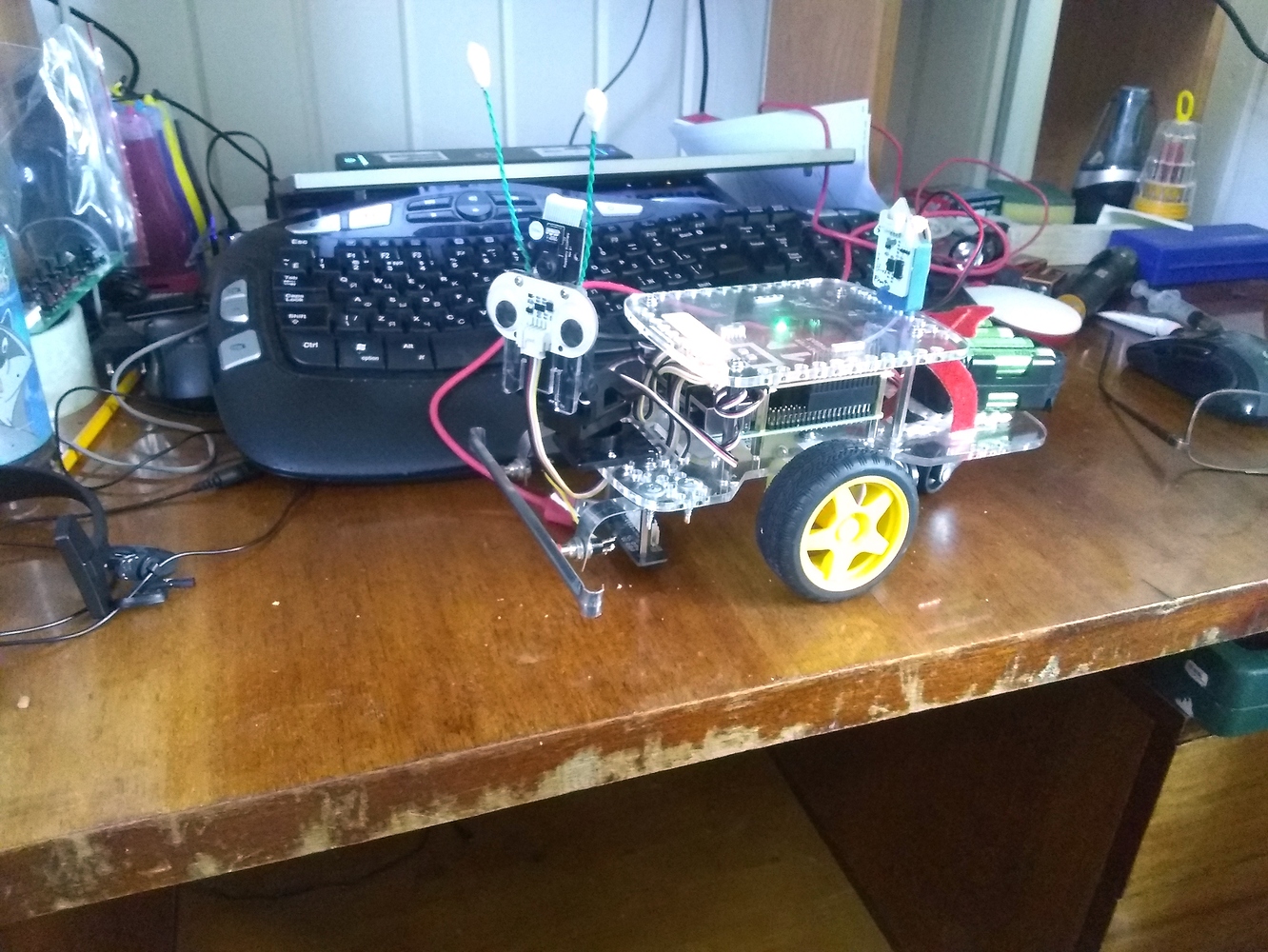
Regarding “stream video to phone” - there is a program for the GoPiGoi called “remote camera robot” that streams video to a specific web page while allowing the robot to be driven by the mouse.
Fair warning: It’s a gnarly mess that I’ve been trying to hack for a while now. Even the folks at Dexter/Modular Robotics aren’t exactly sure how it works anymore!
Getting it to work with a non-standard configuration isn’t something I’d be willing to tackle, but you’re welcome to try.
I am not sure what you mean by “Get remote aerial working”?
Does that mean you want to get WiFi working? If so, remind me what version of the Raspberry Pi are you using? You really want to be using a version, like the Pi3+, that has built-in WiFi as earlier versions with a dongle had no end of troubles.
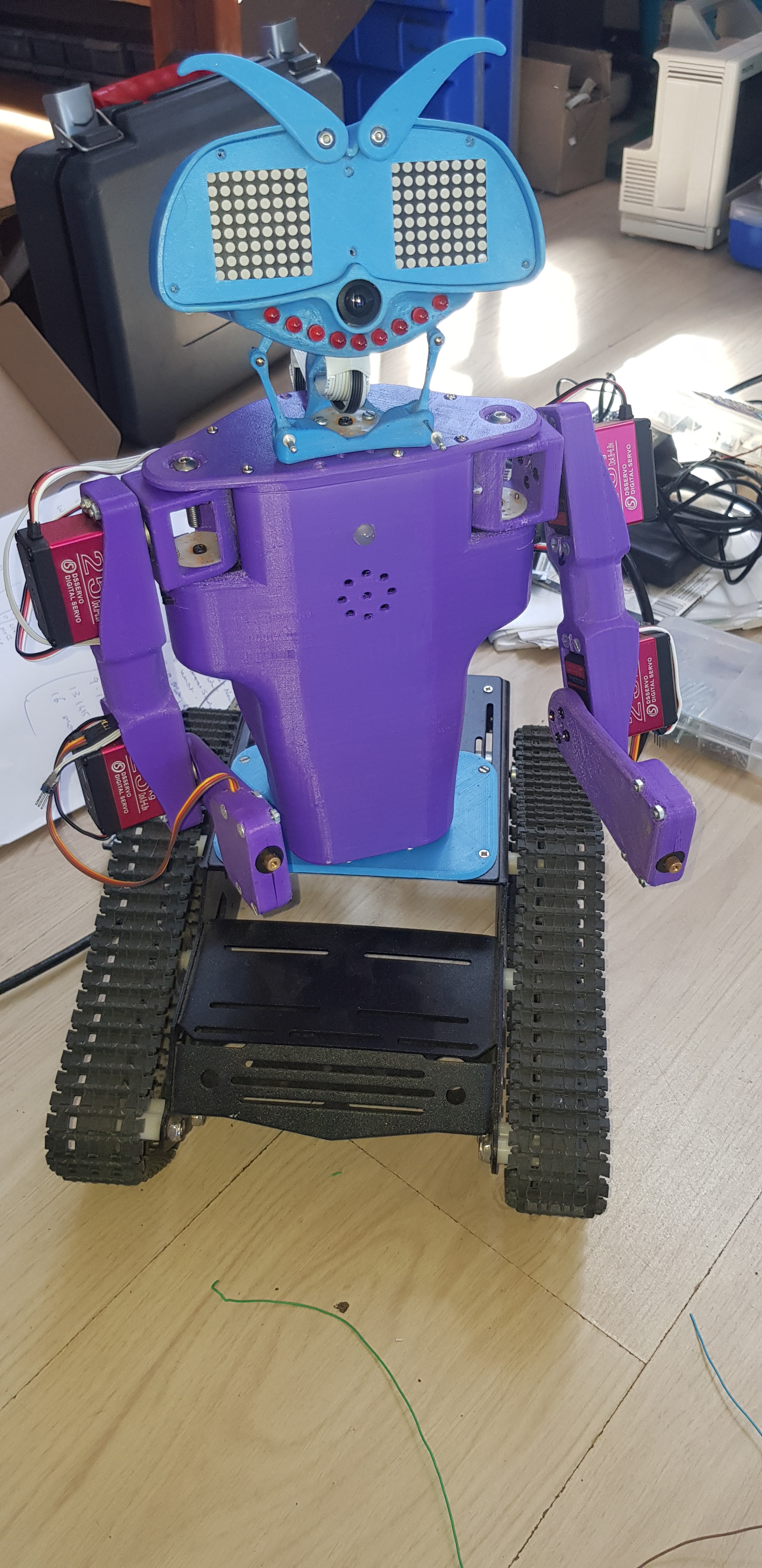
You said “Program mouth LED’s to be voice activated”.
I think what you are asking for is for the mouth LED’s to be sound-activated so that when the device makes a noise - or says something - the “mouth” LED’s flash or move in a pattern timed with the sounds the 'bot is making. Right?
If I could be so bold as to suggest a plan of action, I would suggest collaborating with your daughter and categorizing the tasks you want to complete first by how critically important they are, then by difficulty from simplest to most difficult, so that the simplest most important tasks get done, then more complex important tasks, etc. eventually getting to tasks that are not critically important and/or are unreasonably difficult.
Since it’s not possible to do everything immediately, the two of you need to triage by what’s most important to least important and by simple to complex. This way, you get the most critical tasks done, and as many of the less critical, but relatively simple, tasks done as well.
Another thought is that the two of you might want to step back a few steps and look at the overall goal - which if I am not mistaken is to get the 'bot to a state where the daughter can begin to play with it. Right?
You may want to complete the 'bot to the point where the daughter can play with it, even though it may not be totally complete or fully functional in the absolute sense.
Then, as the daughter and yourself become more familiar with the hardware and software, you can collaborate on what, when, and how, to finish the parts that remain to be done. Maybe the mouth, or even hands, are a “nice to have” but not absolutely critical. This is a design and implementation decision that you and your daughter can share.
Assuming that your daughter has/wants a software/robotics/Engineering career path in her future, this kind of design review, triage, and rearranging of project priorities as the project progresses will be great “real world” project management experience for her.
If she comes out of this with her sanity - and sense of humor! - intact, she’s a definite candidate for that Ph.D. thesis!
Keep the news coming!
 )
) headaches of note
headaches of note