I’m curious if any other users of the dGPS module have seen this issue. To their credit, the folks at Modular Robotics tried to help, but much of the tribal knowledge from Dexter Industries seems to be lost. I understand. It happens.
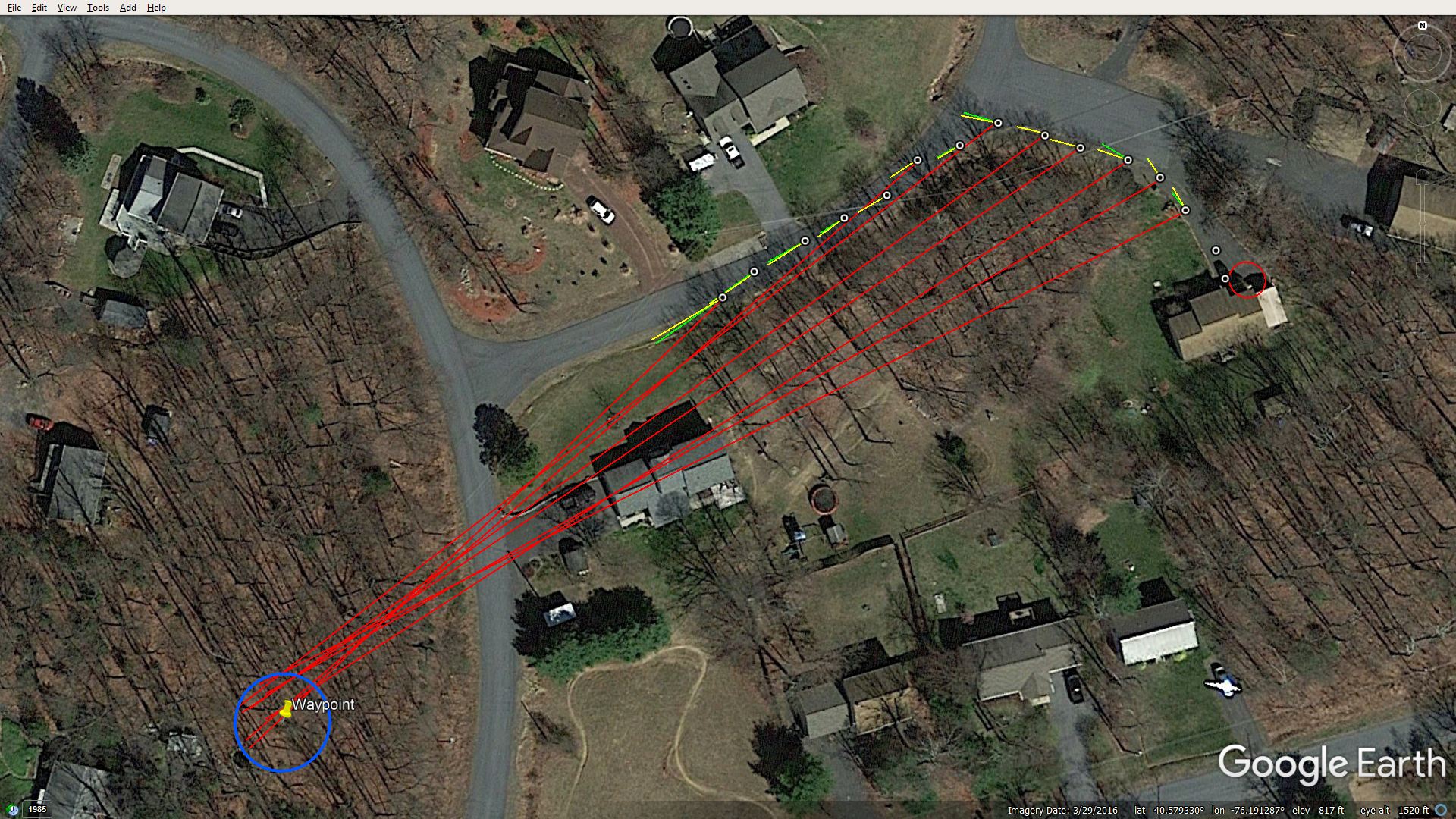
When posted on Google Earth Pro, GoogleMaps and other on-line maps, coordinates taken from the dGPS sensor appear about 300 feet south and 10-15 feet west of where the unit actually was when the coordinates were recorded. It was thought that this might be a conversion issue, but when the coordinates are converted to other formats they still appear at the wrong spot as noted above.
They say the sensor isn’t defective and that this is expected behavior from the sensor. If that is so, how do people deal with it? Is there a mathematical equation that needs to be applied to correct the readings, and to change coordinates taken from maps as waypoints so that the dGPS will go to the right spot?
I will take more data from miles apart, but so far the error seems to be consistent. If so, I can fool the sensor and fix data-logged coordinates, but it seems to me that this should really be unnecessary. I also get that if I want to use a waypoint within walking distance, all I have to do is take the sensor to that spot and use whatever is in the datalog. I think that’s what Dexter Industries did with the SARG parking lot test project.
I’ll look forward to any responses.
Thank you,
Paul
 ) Enabling WAAS is way easier. . .
) Enabling WAAS is way easier. . .