“Coronavirus” wouldn’t damage your eyesight, that is unless you get a massive concussion falling off of something, as they don’t use denatured alcohol in their drinks.
Eight-bit precision is limiting indeed as an 8-bit signed integer, (which is what I believe is returned), has a resolution range of ±127. A resolution of ±127 represents a maximum resolution of about 0.71 degrees of arc.
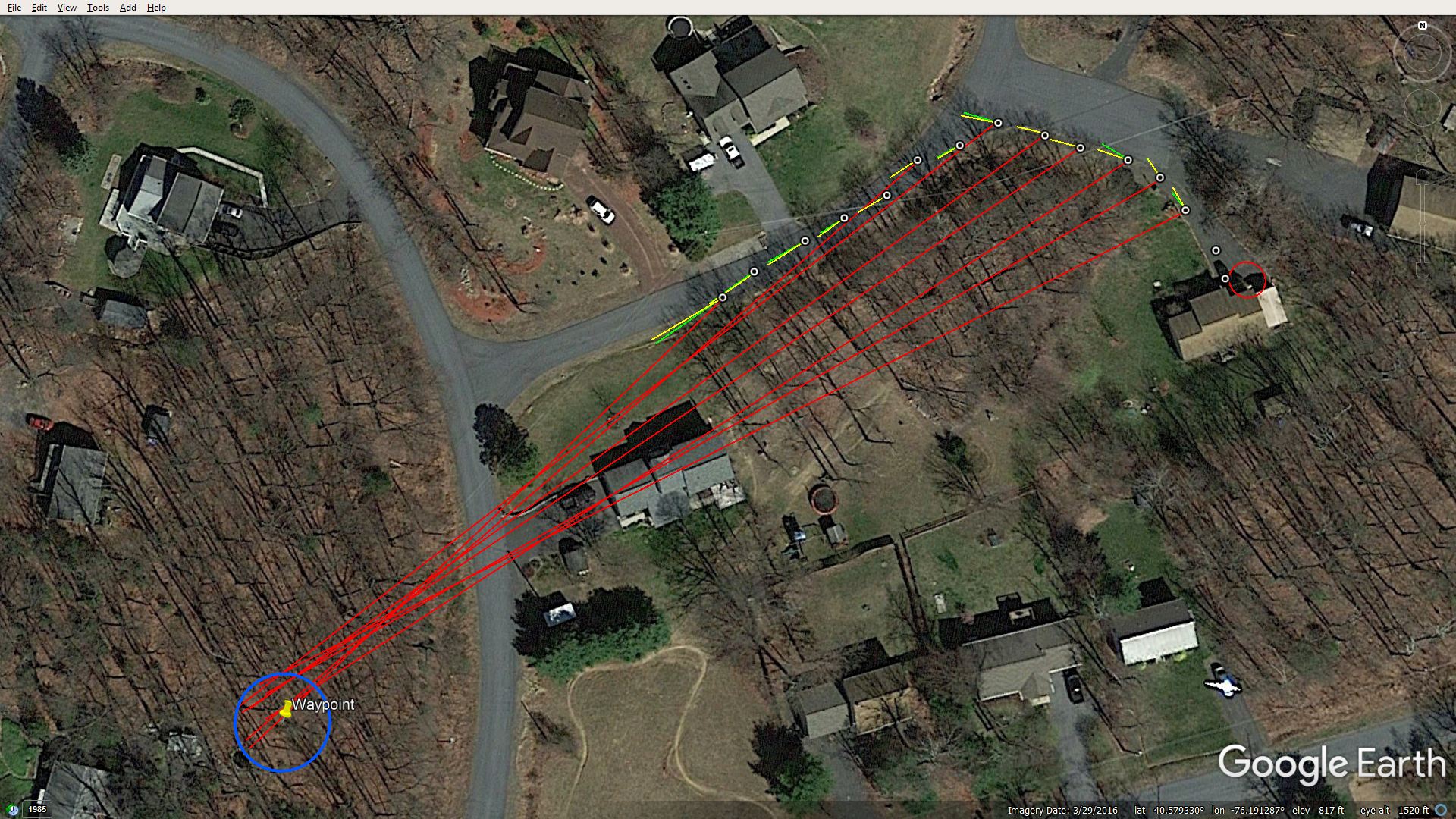
A full degree of arc is not a trivial amount, especially as distance increases, which could explain the large magnitude of error at the waypoint.
Wow - 2/3 of a degree of arc. . . I didn’t think the digital resolution wold be that bad.
You should also note that the degree of precision guaranteed by the GPS is at the location of the GPS itself, not the location of some distant object.
Because of the lack of angular precision, (along with accumulated errors in the imprecise data), the HDOP at a location that is even as close as your target can be quite large. Taking that into account, that 30’ circle is pretty darn good.
If you continue to test, you will likely discover that the positional accuracy of the target point increases as you get closer.
It is important to remember as you test, that the primary function of a GPS is to determine YOUR location with precision, not the location of some distant target.
Since positional information is an eight bit signed integer, that would explain the large variation of precision when starting the GPS. The GPS itself, at maximum accuracy, has a variation of no less than 3 meters, often more. Add to that a 2/3 degree dilution of precision in all directions, it’s no wonder that some of your startup positional readings are in the next county!
BTW, according to this article, a full degree, in either direction at your approximate location, is darn close to 70 square miles.
Since your location is being, (at least internally), calculated to a much higher precision than that, obviously there is either some method of calculating position that is much more highly accurate, or the dilution of precision is caused by the ATMEL processor only being 8-bits wide.