Hey,
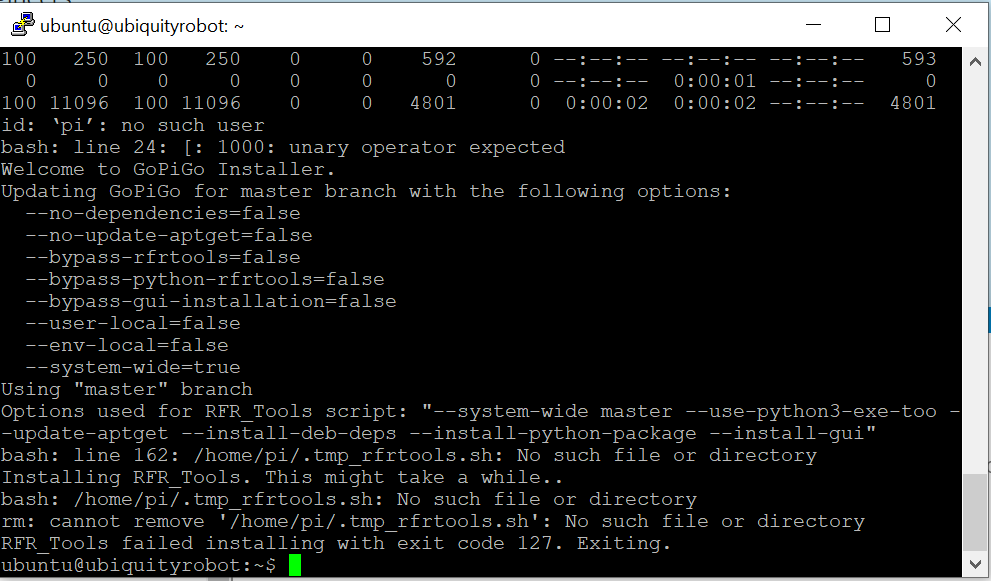
i’m trying to install the GoPiGo3 on my operating system (from ubiquity robotics) but i got the following error.
Can someone here helpe me please ?
Thank you
Moufid
Hey,
i’m trying to install the GoPiGo3 on my operating system (from ubiquity robotics) but i got the following error.
Can someone here helpe me please ?
Thank you
Moufid
Not sure, but I believe the Dexter software can only be installed as user pi, so you will need to create a pi user.
To run installed gopigo software, the user (if not pi) will have to have access to the spi, i2c, gpio hardware so that user probably has to belong to those groups if not already.
/etc/passwd:
pi:x:1000:1000:,,,:/home/pi:/bin/bash
??need www-data user??
www-data:x:33:33:www-data:/var/www:/usr/sbin/nologin
/etc/group:
adm:x:4:pi
dialout:x:20:pi,www-data
cdrom:x:24:pi
sudo:x:27:pi
audio:x:29:pi
video:x:44:pi
plugdev:x:46:pi
games:x:60:pi
users:x:100:pi
input:x:101:pi
netdev:x:108:pi
pi:x:1000:www-data
spi:x:999:pi,www-data
i2c:x:998:pi,www-data
gpio:x:997:pi,www-data
lpadmin:x:114:pi
Like I started, I don’t really know what it takes - there have been others that asked this before and there may be answers in the forum already but perhaps difficult to find.
Pop a note to support@modrobotics.com if you another user does not pop in to answer from experience.
For reference: This user just added pi to sudo group and achieved partial installation that was useful to his purposes:
This would be the entire tree installed at /home/pi/Dexter/
ls /home/pi/Dexter/
black_line.txt detected_robot.txt GoPiGo gpg3_config.json lib range_line.txt Version
BrickPi3 DI_Sensors GoPiGo3 GrovePi PivotPi update_master.sh white_line.txt
Note: the preferred means of telling the gopigo3 using the EasyGoPiGo3 class its WHEEL_DIA and WHEEL_BASE_WIDTH are from the file /home/pi/Dexter/gpg3_config.json but the software will work fine if it does not find that file on your system. I would encourage you to use the EasyGoPiGo3 class instead of the base gopigo3 class because the former implements Mutex protection around the robot’s I2C access which you will likely need if running multiple processes.
Hello cyclicalobsessive,
thanks for replying to my question and let me tell you that your solution works perfectly  i did it.
i did it.
Now i have an other question please. so on my Raspberry Pi is an ubuntu OS 16.04 already installed, where the roscore command (to activate the ROS Master) starts automatically when i turn on my RP. My question is, if there is any solution to run the Roslaunch file with my Master ?
Thank you !