Edu-blocks is an alternative to Jupyter and there are ways to disable Jupyter and enable Edu-blocks.
Quite frankly, with Bloxter in place, I don’t know why they package Edu-blocks with the GPGOS anyway. (It’s been there since at least the 2.n DexterOS releases.)
The new Pi-Zero with the upgraded processor is also a hot ticket, but for people who want to do some SERIOUS bitcoin mining, (), the Pi-4 is still the hot ticket. So much so that certain Micro Centers, (like the one in Cambridge near MIT/Harvard), are limiting the number you can buy at one time.
It might be interesting to revert back to a Pi-3+ and compare the load numbers, power droop, and such like when running GPGOS all out compiling something like wxPython.
It would be really interesting if it turned out that a Pi-4 was significant enough overkill that it ACTUALLY WORKS BETTER with the Pi-3 versions!
For example, putting a Corvair engine in a VW Beetle was a massive performance boost and there were adapter plates manufactured to allow that. However, there were the motor-heads that decided that a blown V8 in a VW Bug was even better. The result was either a monstrosity that couldn’t get out of its own way, a car that flipped over from the torque when you revved the engine, or one that ripped the gears into confetti when you dropped the clutch.
This might be a fruitful line of research sometime.
First you would have to aspirate that Pi3B+, and find some weird aspect for “Works Better”.
No 3B+ is going to beat a Pi4 in compile time, and while the 3B+ uses less power all the way up to full out egg fryer, I happen to be the only one paying attention to that aspect.
Now for running every example DI/MR has ever created for the GoPiGo or GoPiGo3 - Pi3B will win every battle in my eyes (cost, power, noise pollution). The Pi3B+ offers dual WiFi and is available where Pi3Bs are not often available, so MR went with the Pi3B+ and Dave is very pleased.
Was just looking at that Pi4 stress - The GoPiGo3 should be able to supply 1.3A just fine. Perhaps supplying power through the 40-pin limits the current to less than that?
That’s true, if the “water” is R134, or for the serious currency miners, liquid nitrogen.
Should be, but I don’t know what their stress test is.
Like I said, I’d have to seriously instrument the GPG-3 PCB to find out where the problem lies - and it would not surprise me to discover that the Raspberry Pi isn’t that well suited for direct-feed of power through the GPIO pins as it was designed to be used the other way around.
Running the GPG off of my Beast power supply, (using one of the 4A variable outputs), when running MY stress test, which is:
. . . . and after downloading the wxPython-4.1.1.tar.gz file to a directory and running the “compile a wheel-file, but don’t install it” command noted above, the current draw maxes at about 0.7 amps which is appx. 8.4 watts, (compared to 6.4 watts using their test). Guess my stress test beats theirs!
Using the “create wheel” stress test noted above, I would want to examine and record data for the following parameters:
Voltage droop
Current draw
Throttling, if any.
Processor utilization.
Memory utilization.
Processor temp.
(and as a tie-breaker)
Total wall time for the compile.
Though, as you suggest, there may not be a clear winner; but, (depending on what’s important to you), the comparison would be interesting.
Quite frankly, I would expect the Pi-4 to beat the pants off a Pi-3 - but I’ve seen some interesting benchmarks where the Pi-3 and Pi-4 were neck-and-neck, so I would not say it’s a forgone conclusion until the last horse has run.
And that’s the real bottom line. Does it meet YOUR needs?
With all due respect to everyone involved, my major interest in the Pi-4 is that, (IMHO), it represents an “edge-case” in the design of the GPG-3, and since people will want to buy them and use them, there should be a body of research that addresses this.
I can confirm that the Raspberry Pi-4 also causes voltage alerts on Raspbian for Robots, though you need to work harder at it.
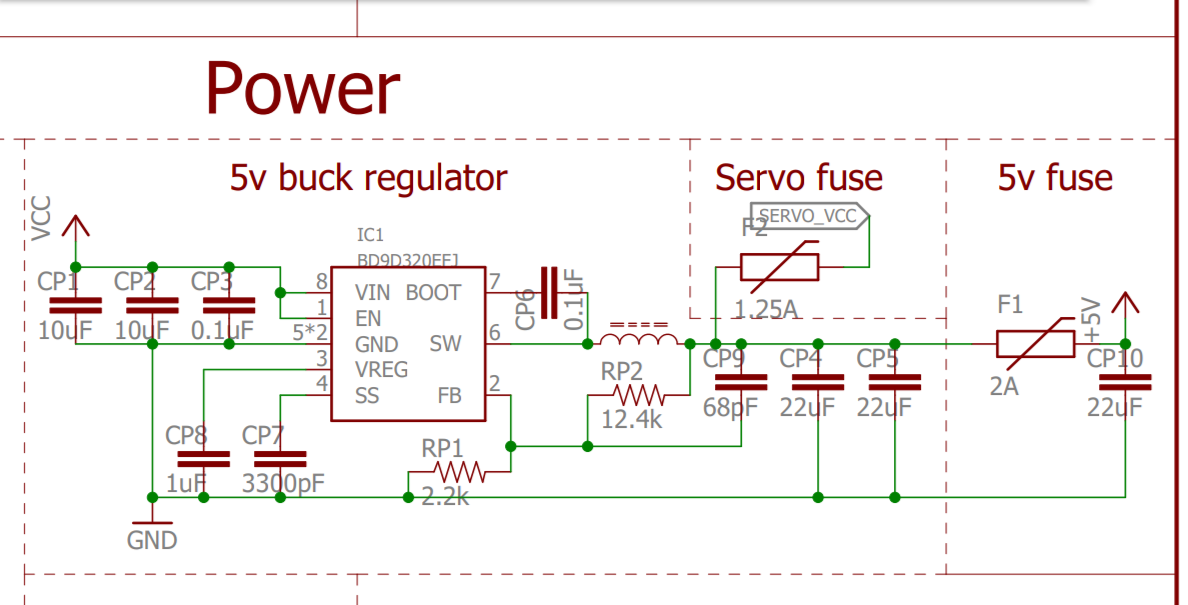
Unfortunately, the latest schematics I have seen do not include the entire 40 pin connector, so I cannot tell if later versions of the GoPiGo-3 use additional 5v pins or if the current capabilities are greater.
Note that the GoPiGo-3’s power supply fuse is rated (on the schematic) at two amps.
Also note that the servo fuse is rated at 1.5 amps.
Therefore, (technically at least), the GoPiGo-3 cannot fully support the Pi-4 as it cannot provide the required current.
Technically it doesn’t support the Pi-3 either as the power draw on the +5 rail is the sum of all the on-board +5v current, the servos when active, AND the current drawn by the Pi itself. Maybe a Pi-Zero 2 is a better option?
If you want to be really picky, the maximum current draw for the Pi is.1.5 amps, assuming a de minimus on-board current draw, and minimal use of the servos, (or servos with a very light current requirement).
The +5v fuse is a solid-state fuse and apparently has a certain amount of current tolerance. Either that, or the GoPiGo’s 5v regulator folds back rapidly once the current requirement rises past about 2.5 to 3 amps.
In any event, I may have to migrate Charlie back to my Pi-3. !!!
Additional update.
I have provided my experimental data to MR’s support e-mail with a recommendation to re-evaluate the GoPiGo’s power supply.
I am also researching simple current upgrades to the GoPiGo’s PCB.
Why? My impression, from your posts, of Charlie’s mobile processing load is that you have not and will not see under-voltage throttling.
You only saw the issue because of a non-mobile max-processor usage compatible with hooking Charlie’s umbilical cord back to the mother load.
Further, if it ain’t broke don’t fix it, just plug it in.
What might be interesting is to run:
$ sudo apt install stress
$ ./throttled.sh (get temperature, confirm no throttling status)
$ uptime (get 1/5/15 load)
$ stress -v -c 2 -t 180 (run two cores at max for three minutes)
$ ./throttled.sh (check temp and confirm still no throttling status)
$ uptime (get 1/5/15 load)
Repeat while driving him around the room?
And perhaps repeat without the fan running…
I’m guessing running mobile you never stress more than that for longer than that.
When I run stress -c 2 -t 180 on Carl’s Pi3B with no fan the temp only gets up to 60degC, and I don’t have any “Carl Behavior” that uses more processor than that.
What puzzles me is that even if I assume a full 9 watts draw by the Raspberry Pi itself, the calculated current draw is only 1.8 amps, and I cannot imagine how a 1.8 amp load is causing the GoPiGo to overload the power supply to the point of voltage fold-back.
The only things running on the GoPiGo are the four LEDs and they are not running at full brightness.
On both GPGOS and R4R, something as simple as downloading a large file caused it to go under voltage.
interestingly enough, using my store-bought multimeter to measure the VCC (+5) directly, (at GPIO pins 2 and 6), I measure almost exactly 0.07v low - i.e. 4.97 on your voltage test shows as 4.90 on my meter.
Interesting factoid:
The Raspberry Pi documentation says that throttling is supposed to take place at 4.63v ±5%. Powering my GoPiGo directly from the 5v pins on the GPIO, and using my variable supply, I see about 1 amp with nothing interesting running and it throttles at 4.96 volts!
What the ???!!
Measuring across D1, (the reverse-voltage protection diode), the voltage is about 0.10 v lower - but even that isn’t low enough to throttle.
“Streaming Nickelback” Carl at 0.40 1min load reports 5.08v (Battery at 10.38v actual)
“On Lithium To Even Out His Moods” Dave at 0.17 1min load reports 4.97v (Battery at 11.8v actual)
 ), the Pi-4 is still the hot ticket. So much so that certain Micro Centers, (like the one in Cambridge near MIT/Harvard), are limiting the number you can buy at one time.
), the Pi-4 is still the hot ticket. So much so that certain Micro Centers, (like the one in Cambridge near MIT/Harvard), are limiting the number you can buy at one time.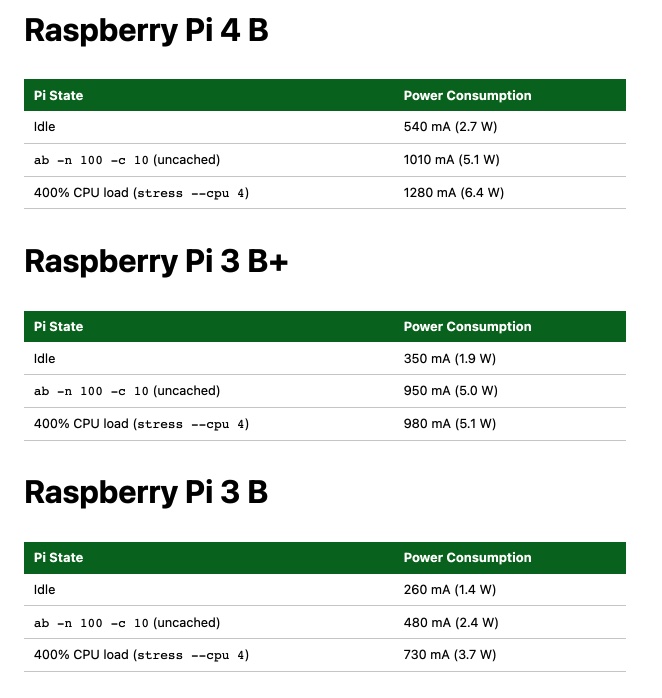



 !!!
!!!