One of the open source community’s maxims is “scratch(ing) the itch”.
If you have a need and it doesn’t exist yet, (or what exists doesn’t work for you), make your own!
Both @KeithW and @cyclicalobsessive have typified this working to get ROS working on their respective GoPiGo 'bots.
Me?
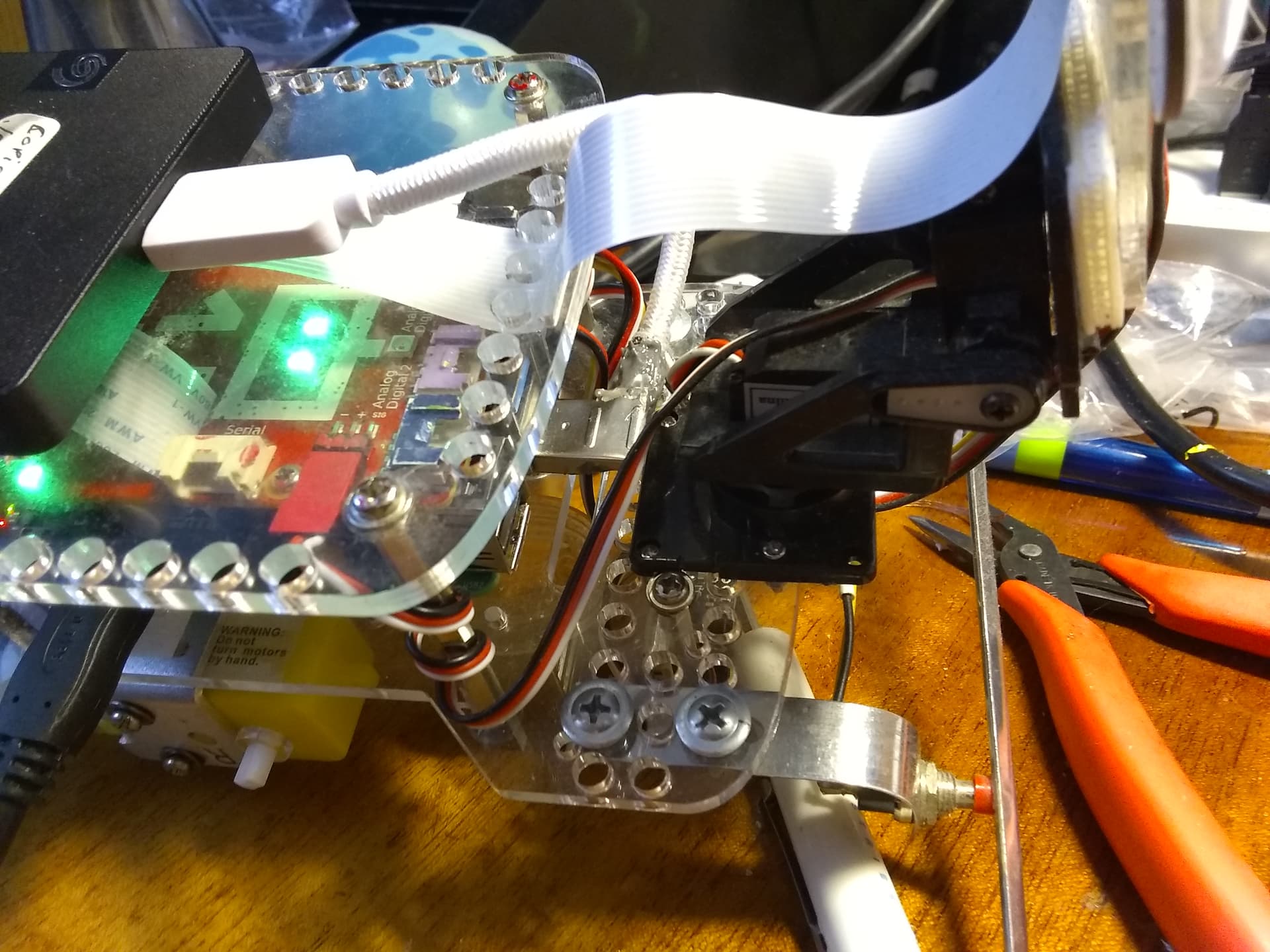
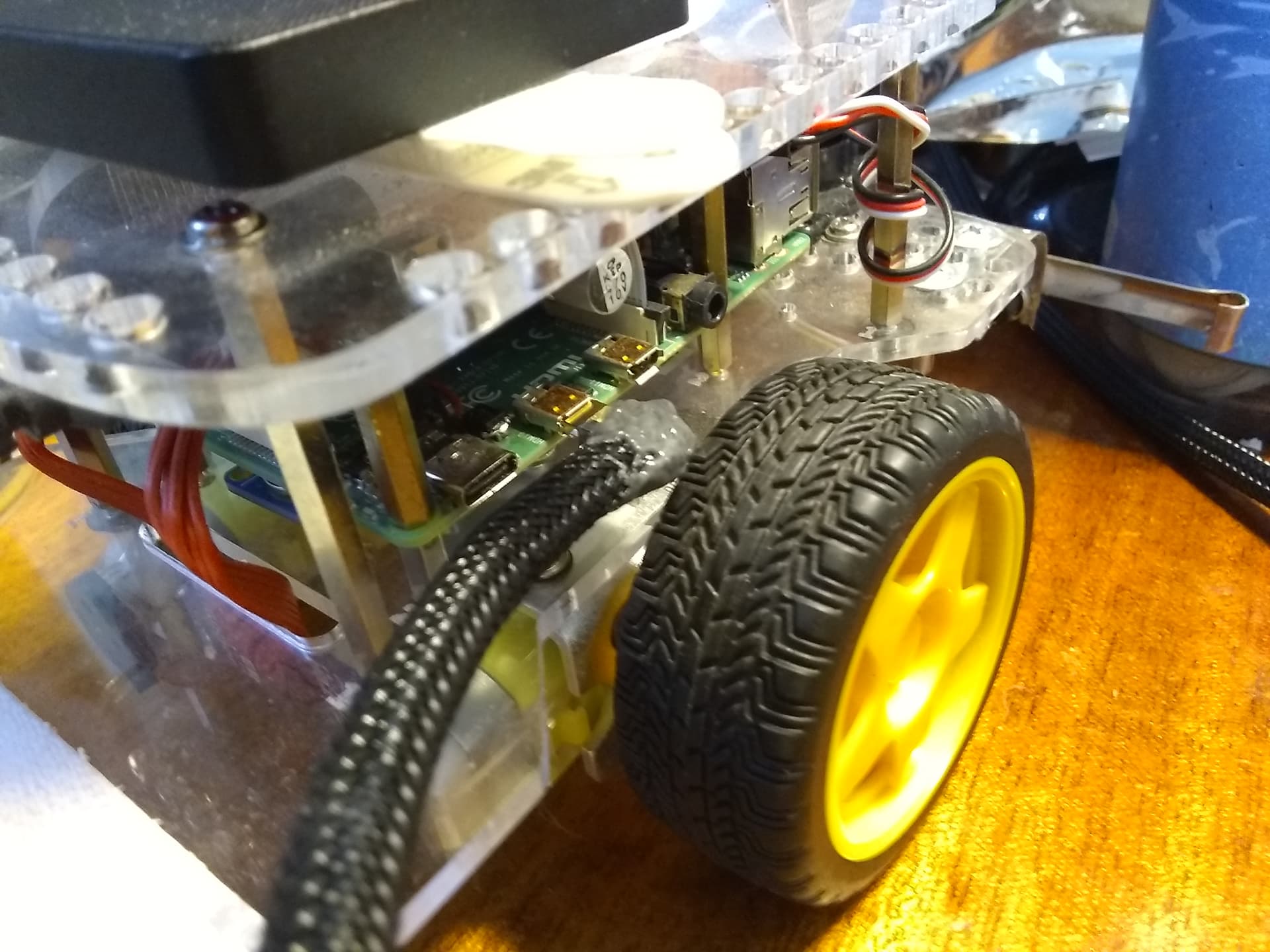
I needed a right-angle USB-3 connector for Charlie so that I can plug his SSD into a USB-3 connector on my Pi.
The problem is that the pan-and-tilt sits in front of the USB-3 ports and a standard connector is too long
I can, and have, plugged it into a USB-2 connector, but I want to save those for keyboards, mice, and other goodies.
You can buy 'em, but they’re expensive, (here), and take over three months to arrive - AND they’re too big.
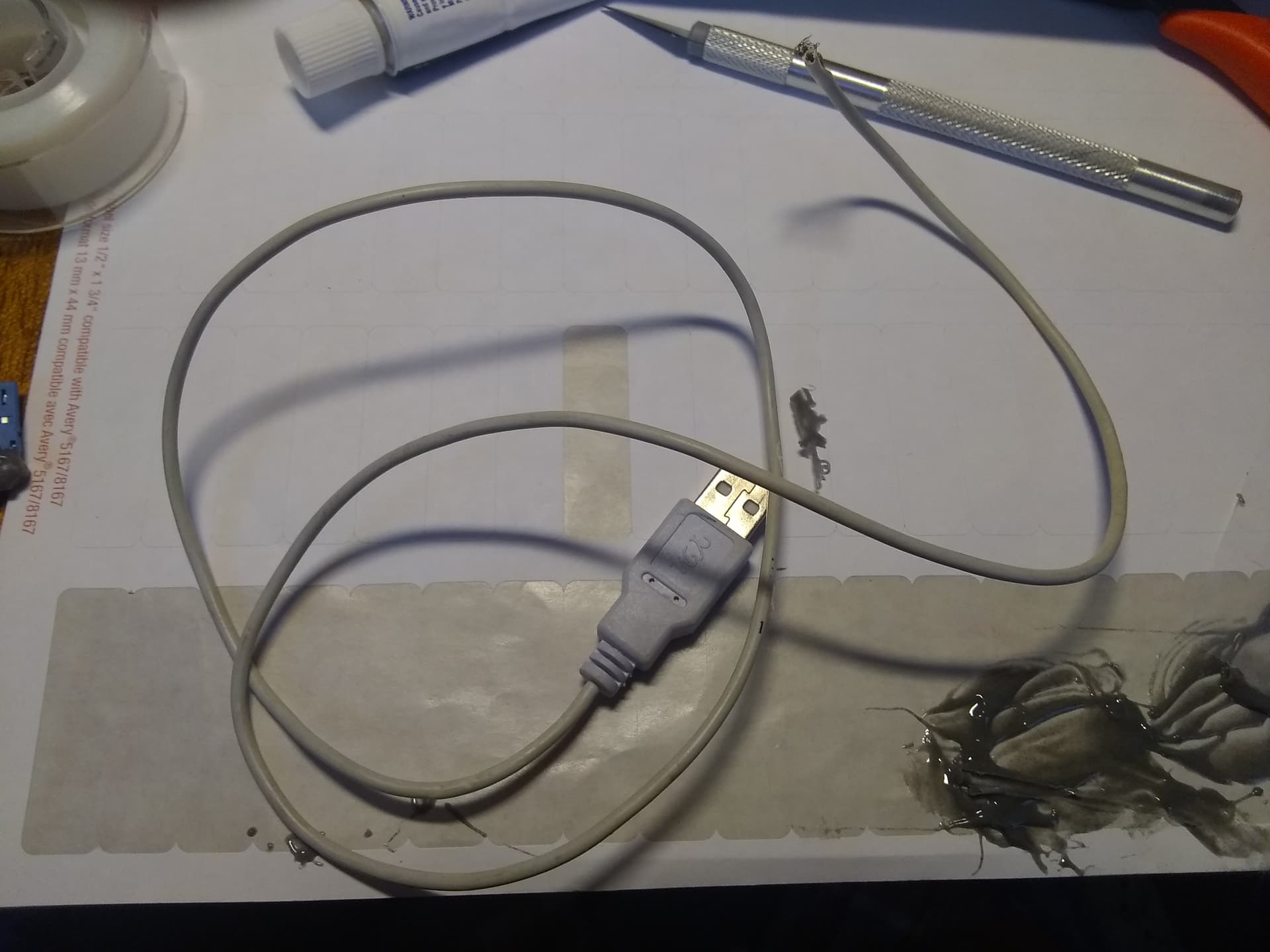
So, here’s my itch-scratcher.
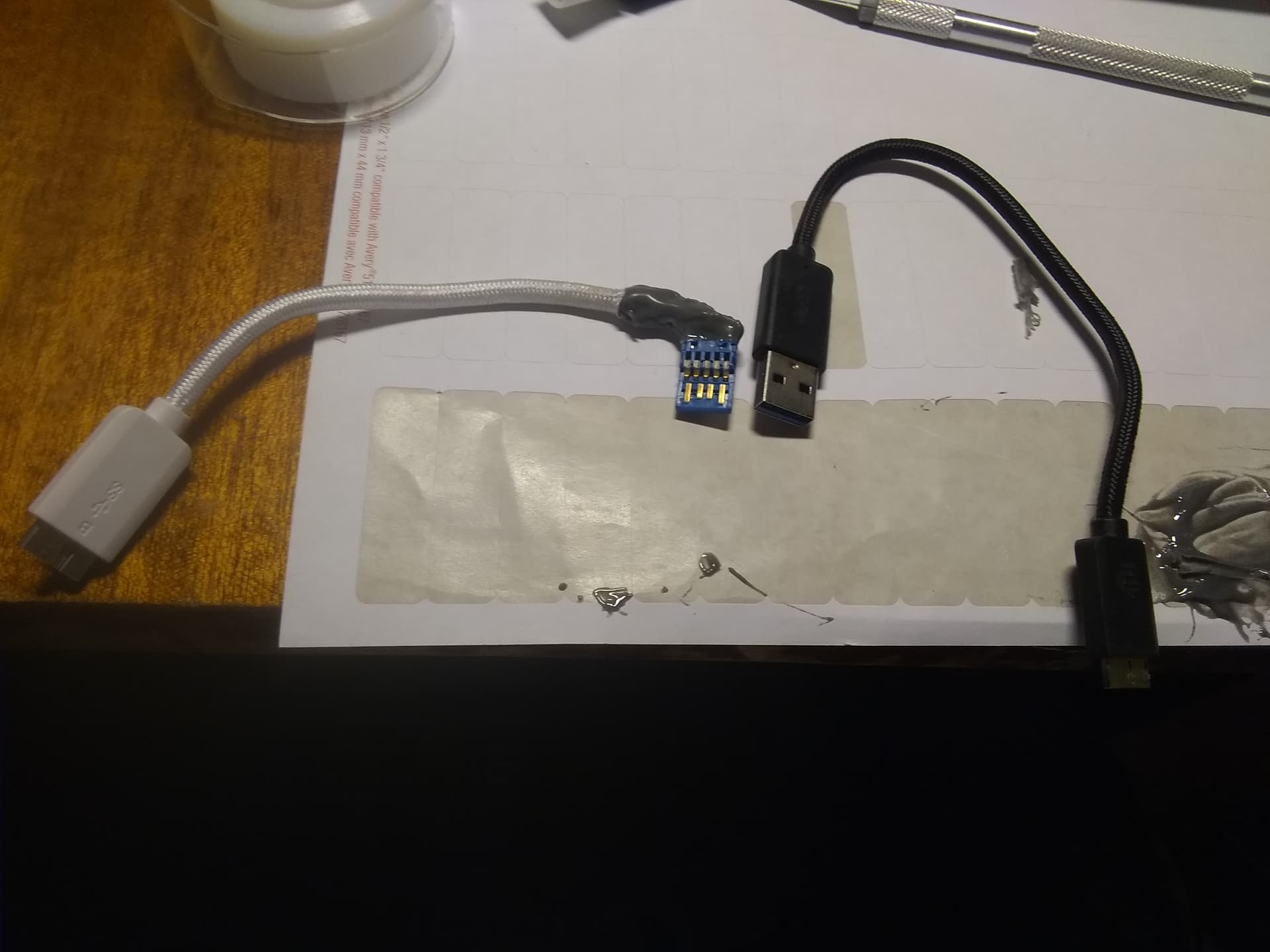
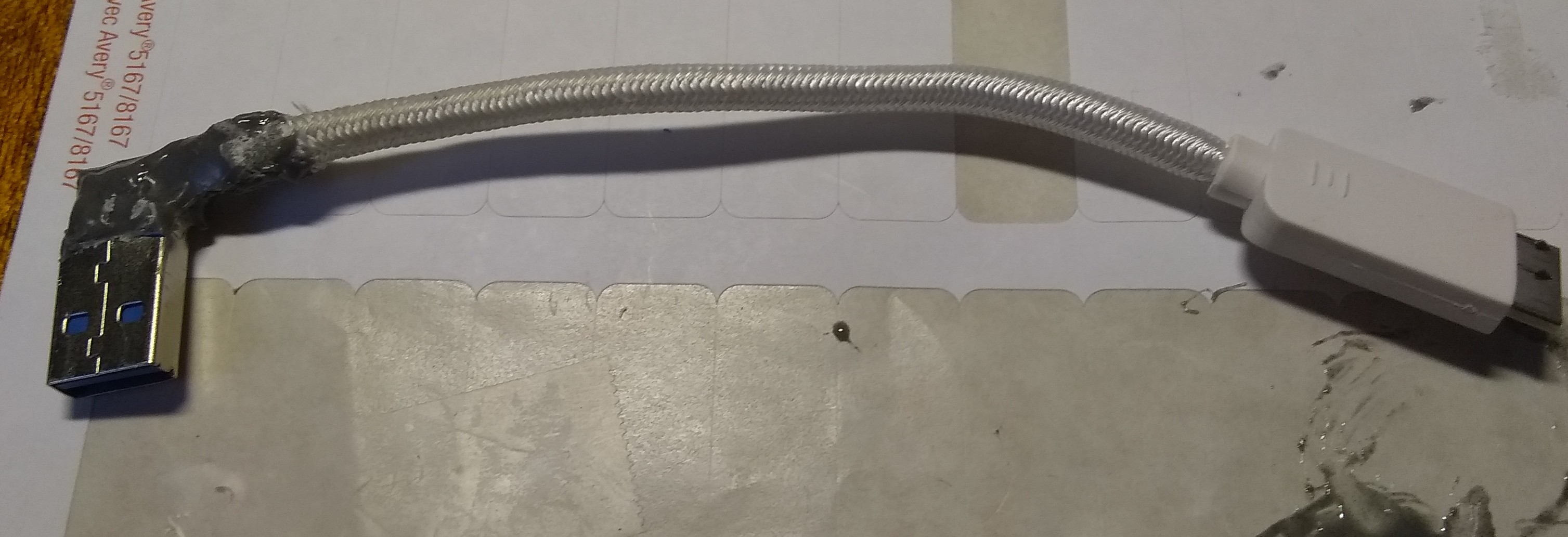
I took apart the USB connector from one of the SSDs, removed the wiring (that was firmly embedded in hot-melt goop), resoldered all the wires and potted them in epoxy.
It’s about 3 inches shorter and fits behind and below Charlie’s pan-and-tilt.
All I need to do now is tear apart a dead USB cable for the shell, and put the metal shell back over the contacts to help lock it in place.
Ugly as  , but it works!
, but it works!