I have installed Raspbian on my Raspberry Pi and finished the installation. However, it keeps giving error “No SPI response, GoPiGo3 with address 8 not connected.” I followed this post [SOLVED] GoPiGo3 with address 8 not connected to update the Firmware too, but still no luck. Please help me!
Hi, did you also try to update the software to the latest version? I read this sometimes helps.
(Is under the same icon you used to update the firmware on the desktop).
Hi! Which file do you refer to? For updating the Firmware, I use the bash file at Firmware directory but I do not see an icon.
Here is output from Firmware update. Does that mean the update fails?
Updating the GoPiGo3 Firmware with '/home/pi/Dexter/GoPiGo3/Firmware/GoPiGo3_Firmware_1.0.0.bin'.
Open On-Chip Debugger 0.10.0-dev (2016-12-16-18:07)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
BCM2835 GPIO nums: swclk = 25, swdio = 24
BCM2835 GPIO config: srst = 18
srst_only separate srst_gates_jtag srst_push_pull connect_deassert_srst
srst_only separate srst_gates_jtag srst_push_pull connect_deassert_srst
adapter speed: 400 kHz
cortex_m reset_config sysresetreq
adapter speed: 250 kHz
adapter_nsrst_delay: 100
adapter_nsrst_assert_width: 100
Info : BCM2835 GPIO JTAG/SWD bitbang driver
Info : SWD only mode enabled (specify tck, tms, tdi and tdo gpios to add JTAG mode)
Info : clock speed 250 kHz
Info : SWD DPIDR 0x0013fb10
Error: Could not initialize the debug port
TargetName Type Endian TapName State
-- ------------------ ---------- ------ ------------------ ------------
0* at91samc20j18.cpu cortex_m little at91samc20j18.cpu unknown
Error: Could not initialize the debug port
Error: Target not examined, will not halt after reset!
Error: Could not initialize the debug port
Error: Target not examined yet
Error: Target not examined yet
embedded:startup.tcl:21: Error:
in procedure 'reset'
in procedure 'ocd_bouncer'
in procedure 'ocd_process_reset'
in procedure 'ocd_process_reset_inner' called at file "embedded:startup.tcl", line 248
in procedure 'at91samc20j18.cpu' called at file "embedded:startup.tcl", line 331
in procedure 'ocd_bouncer'
in procedure 'at91samc20j18.cpu' called at file "embedded:startup.tcl", line 297
in procedure 'ocd_bouncer'
at file "embedded:startup.tcl", line 21
TARGET: at91samc20j18.cpu - Not halted
in procedure 'reset'
in procedure 'ocd_bouncer'
Hi,
I probably took the poor man’s approach:
- Installed Raspbian for robots (Jessie) from the website
- I “VNC-ed” into Raspbian (using real VNC)
- That gave me this screen (which should be the same as connecting with a monitor through HDMI I guess)

-
There I selected “DI Software Update”
-
This opens this screen:
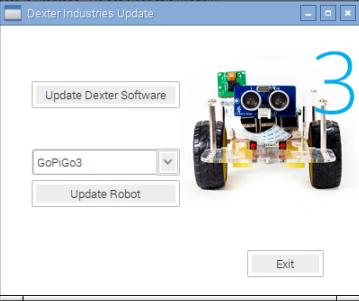
- From there I selected my GiPiGo3, and pressed both Update Robot (to update the firmware) and “Update Dexter Software” (to update the software: this actually takes a couple of minutes).
After that it worked for me.
rgds,
Jacco
1 Like
Sorry for the slow response. I am busy doing my other projects. Can you explain how to VNC to the Pi? Or any resources I can refer to?
Hi @jcao62,
Does running the following command help you? (the command you’ve seen on the linked thread didn’t have the sudo command before bash)
curl -kL dexterindustries.com/update_gopigo3 | sudo bash
And after it finishes running, install the firmware burner once again and see if the GoPiGo3 is found.
Also, can you check and see if the SPI line is enabled in raspi-config?
Thank you!
Hi Robert,
I did do sudo and turned on SPI on my Pi. I read this post [SOLVED] GoPigo won’t turn on and realized that my red board’s light could not be turned on. I tried to flash new images multiple times, but could not work. I guess probably the red board was broken?
Hi @jcao62,
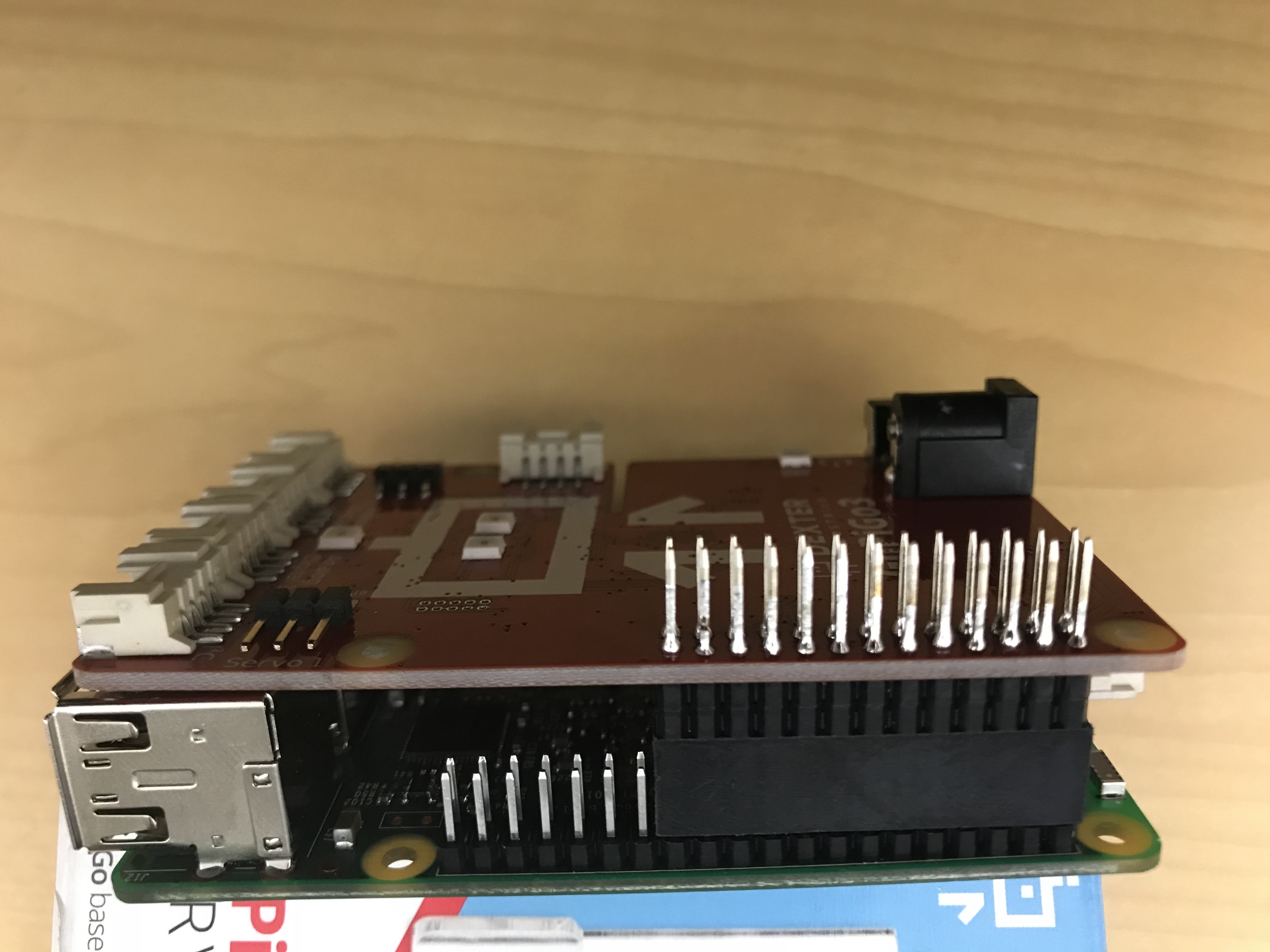
There would be one more thing: the alignment of pins.
Could you show us a photo of your GoPiGo3 board and Raspberry Pi from the header pins’ side? we want to see how they are aligned.
Thank you!
Hi,
I put a picture showing how two boards are connected.
Anyway, we returned the old redboard and bought a new one and it works well.
Hi @jcao62,
That’s what we were going to suggest you - during this period, we have had discussion on this matter, but we didn’t notice that you got a new one already.
Thank you!